═Ž└ŁÖCū„×ķę╗ĘNųžę¬Ą─īŹė├ÖCąĄäė┴”─ŻēKŻ¼į┌▐rśIū„śI╔Žæ¬ė├ė╚×ķÅVĘ║Ż¼ęįŲõ×ķäė┴”Ą─š¹ĄžĪó▓źĘNĪóų▓▒ŻĪó╩š½@Īó▀\▌öĄ╚▐rśIÖCąĄį┌«öŪ░╝░ęį║¾Ą─¼F┤·╗»▐rśI╔·«aųą▓╗┐╔╗“╚▒.╚╗Č°į┌ū„śI▀^│╠ųąė╔ė┌ÖCąĄ╗»ū„śIĢrŻ¼ū„śIÅŖČ╚┤¾ĪóŁhŠ│Å═ļsÉ║┴ė╩╣Ą├±{±éåTĘŪ│Ż╚▌ęūŲŻä┌.ļSų°ė├æ¶║═╩ął÷▓╗öÓĄ─░lš╣Ż¼įĮüĒįĮČÓĄ─įOėŗ║═蹊┐īó╚╦ę“╣ż│╠┼c╣żśIįOėŗŽÓĮY║ŽŻ¼ć°ā╚ŽÓĻPīWš▀ßśī”▐rÖC±{±é╩ę▀Mąą┴╦ČÓśė╗»Ą─蹊┐┼cĖ─▀MĪŻ
į┌╚š▒ŠĪóÜW├└Ą╚▐rśI¼F┤·╗»│╠Č╚▌^Ė▀Ą─ć°╝ę║▄įńŠ═īó╚╦ÖC╣ż│╠æ¬ė├ė┌▐rśIÖCąĄĄ─įOėŗ┼cįuārŻ¼─┐Ū░Ųõ蹊┐ųž³cé╚ųžė┌±{±é╩ę║═ū∙ę╬£pš±æę╝▄Ą─蹊┐Ż¼ŽÓī”ė┌┤╦╬ęć°Ą─蹊┐─┐Ū░ę└╚╗╠Äė┌│§╝ēļAČ╬.▒ŠčąŠ┐öMęįæ¬ė├ÅVĘ║Ą─ć°«a¢|ĘĮ╝tLX854▌å╩Į═Ž└ŁÖC±{±é╩ę×ķ蹊┐ī”Ž¾Ż¼╩ūŽ╚▓╔ė├CATIA▄ø╝■Į©┴ó±{±é╩ę╚½│▀┤ń─Żą═║═ųąć°╚╦¾w╚²ŠS─Żą═▓óĮM│╔╚╦ÖC╣ż│╠ŽĄĮyŻ¼ų«║¾▓╔ė├CATIA╚╦ÖC╣ż│╠─ŻēKī”▓╗═¼¾wą═±{±éåTį┌═Ž└ŁÖC±{±é╩ęā╚Ą─ū°ū╦Īó▓┘┐v┼_┐╔▀_ąįęį╝░╣żū„ęĢę░Ą╚▀MąąĘ┬šµĘų╬÷┼c蹊┐Ż¼▓óī”±{±é╩ę┐é¾w▓╝ŠųĄ─║Ž└Ēąį▀MąąįuārĪŻ
1 ╚╦ÖCŽĄĮyĄ─śŗĮ©
1.1 H³cĄ─┤_┴ó
│¾³c╩ŪųĖČ■ŠS╗“╚²ŠS╚╦¾w─Żą═ųą╚╦¾w▄|Ė╔║═┤¾═╚Ą─Į╗Įė³cŻ¼╩Ū┼cū°ū╦╩µ▀mąį║═▓┘┐vĘĮ▒Ńąį├▄ŪąŽÓĻPĄ─▄ćā╚čbų├│▀┤ń╗∙£╩³c.┤_Č©īŹļH│¾³cĄ─ĘĮĘ©═©│Żėąā╔ĘN:ę╗ĘN╩ŪSAEČ■ŠS╚╦¾wśė░µįOėŗĘ©Ż¼┴Ēę╗ĘN╩ŪSAE═Ų╦]Ą─▀mę╦│¾³c╬╗ų├ŠĆĘ©ĪŻ▒ŠčąŠ┐ų„ę¬▓╔ė├SAE═Ų╦]Ą─│¾³c▀mę╦ŠĆĘ©┤_Č©─Żą═Ą─│¾³cĪŻĶbė┌═Ž└ŁÖCī┘ė┌BŅÉ▄ćĘČ«ĀŻ¼Ųõ±{±éåT─ą┼«▒╚└²ę╗░ŃĮķė┌90:10ų┴95:5ų«ķgŻ¼ę“┤╦┐╔Ė∙ō■╣½╩Į

┤_Č©±{±é╩ęųąĄ─H³c┼c╚╦¾w─_Ė·ų°Ąž³cŻ©AHP)Ą─╦«ŲĮŠÓļxXĪŻ
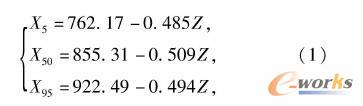
Ė∙ō■H³c╩ŠęŌĘ©Ż¼╩ūŽ╚æ¬╣└╦Ń│÷īŹļHH³c┼c┤_Č©Ą─╝ė╦┘╠ż░Õ§Ó³c╬╗ų├Ą─┤╣ų▒ŠÓļxŻ¼╝┤ZųĄŻ¼ŲõųĄę╗░Ńæ¬╚Ī450?520mmų«ķg.ė╔ė┌¢|ĘĮ╝tLX854ą══Ž└ŁÖCū∙ę╬▒Ē├µŠÓAHPĄ─┤╣ų▒ŠÓļx×ķ400mmŻ¼Č°╚╦¾wš²│Żū°ū╦Ž┬Ą┌5Ż¼50Ż¼95░┘Ęų╬╗╚╦¾w─Żą═┤¾═╚║±ę└┤╬×ķ112,130,151mmŻ¼Ė∙ō■Įø“×Ęųäe▀x╚ĪZ95×ķ490mmŻ¼Z50×ķ470mmŻ¼Z5×ķ450mm.┤·╚ļ╩ĮŻ©1)Ą├

ĮY║ŽGB/T6235—2004ĪČ▐rśI═Ž└ŁÖC±{±éåTū∙╬╗čbų├│▀┤ńĪĘH³c═Ų╦]╚ĪųĄĘČć·╝┤┐╔┤_Č©▓╗═¼░┘Ęų╬╗±{±éåTīŹļHH³cĄ─╬╗ų├Ż¼Å─Č°īŹ¼F╚²ŠS╚╦¾w─Żą═į┌±{±é╩ęųąĄ─Č©╬╗.ūŅĮKP5Ż¼P50Ż¼P95±{±éåT─Żą═īŹļHH³cį┌Ż©XŻ¼Z)╔ŽĄ─ū°ś╦Ęųäe×ķŻ©550mmŻ¼450mm)Ż¼Ż©620mmŻ¼470mm)Ż¼Ż©680mmŻ¼490mm)Ż¼YĘĮŽ“╔ŽĄ─╬╗ų├┼cū∙ę╬┐vŽ“ųąą─├µĄ─╬╗ų├ę╗ų┬ĪŻė╔┤╦╝┤┐╔┤_Č©▓╗═¼░┘Ęų╬╗╚╦¾w─Żą═īŹļHH³cĄ─┐šķg╬╗ų├ĪŻ
1.2 ±{±é╩ę─Żą═Ą─Į©┴ó
LX854═Ž└ŁÖC±{±é╩ęā╚▓┐┐é¾w▓╝Šų╚ńłD1╦∙╩ŠĪŻĖ∙ō■GB/T6238—2004ĪČ▐rśI═Ž└ŁÖC±{±é╩ęķTĄ└ĪóŠo╝▒│÷┐┌┼c±{±éåTĄ─╣żū„╬╗ų├│▀┤ńĪĘ┼cGB/T6235—2004ĪČ▐rśI═Ž└ŁÖC±{±éåTū∙╬╗čbų├│▀┤ńĪĘŻ¼▓óĮY║ŽLX854±{±é╩ęīŹļH▓╝Šų║═ŲõįOėŗę¬Ū¾Ż¼╝┤┐╔▓╔ė├CATIA▄ø╝■Į©┴óŲõ±{±é╩ęĄ─╚²ŠSīŹ¾w─Żą═Ż¼╚ńłD2╦∙╩ŠĪŻ

łD1 ═Ž└ŁÖC±{±é╩ęā╚▓┐▓╝Šų
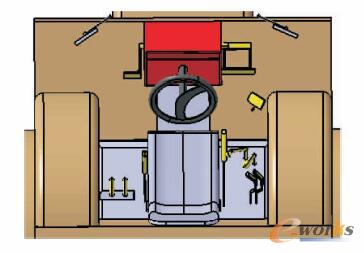
łD2 ═Ž└ŁÖCš¹ÖC╚²ŠS─Żą═
1.3 ╚╦¾w─Żą═Į©┴ó
┐╝æ]ĄĮCATIA▄ø╝■¤oĘ©╠ß╣®ųąć°ā╚Ąž│╔─Ļ╚╦╚╦¾w─Żą═öĄō■Ż¼ę“┤╦ąĶę¬Ė∙ō■GB10000—88ĪČųąć°│╔─Ļ╚╦╚╦¾w│▀┤ńĪĘ╠ß╣®Ą─öĄō■Į©┴óųąć°╚╦¾w│▀┤ńĄ─╚²ŠS╚╦¾w─Żą═.Ķbė┌▓╔ė├CATIA▄ø╝■Į©┴ó╚╦¾w─Żą═ąĶę¬65éĆ│▀┤ńūā┴┐Ż¼Č°GB10000—88āH─▄╠ß╣®20éĆųžę¬Ą─╚╦¾wģóöĄūā┴┐Ż¼ę“┤╦ąĶę¬ī”üåų▐╚╦¾wöĄō■▀Mąą║Ž└Ē▀xō±ĪŻĄ½ė╔ė┌─Żą═ųžę¬│▀┤ńų„ę¬╗∙ė┌ŽÓĻPć°ļHś╦£╩Ż¼Ųõ£╩┤_ąį┼c┐╔┐┐ąį▓ó▓╗Ģ■╩▄ĄĮ░┤Įø“×▀x╚ĪĄ─öĄō■Ą─ė░ĒæĪŻ
┤╦═ŌŻ¼×ķŽ¹│²£y┴┐Ģr┤®ę┬å╬▒ĪŪę▓╗┤®ą¼ūėęį╝░ū„śIĢr╔Ē¾wūāą╬Ą─ė░ĒæŻ¼æ¬ė├ć°ś╦öĄō■Ģræ¬ę²╚ļ“ų°čbą▐š²┴┐”┼c“ū╦ä▌ą▐š²┴┐”2éĆģóöĄī”ŽÓĻPöĄō■▀Mąąą▐š²ų«║¾Ż¼╝┤┐╔▓╔ė├▄ø╝■╚╦ÖC╣ż│╠─ŻēKīó±{±éåT╚²ŠS╚╦¾w─Żą═░┤īŹļH│¾³cĄ─╬╗ų├ū°ś╦į┌±{±é╩ęųą▀MąąČ©╬╗Ż¼Į©┴ó╚╦ÖCŽĄĮyĄ──Żą═ĪŻłD3╦∙╩Š╝┤×ķī¦╚ļ╚╦¾w─Żą═║¾Ą─═Ž└ŁÖCĄ─╚╦ÖCŽĄĮy─Żą═ĪŻ

łD3 ═Ž└ŁÖCĄ─╚╦ÖCŽĄĮy─Żą═
2 ŽĄĮy╚╦ÖC╣ż│╠īWĘų╬÷┼cįuār
┐╝æ]ĄĮ«öŪ░┤¾▓┐Ęų═Ž└ŁÖC±{±é╩ę╩µ▀mąį蹊┐Š∙ęįĄ┌50░┘Ęų╬╗Ż©ųąĄ╚¾wą═Ż®╚╦¾w─Żą═×ķī”Ž¾ęįØMūŃ90%Ą─▀mæ¬ąįŻ¼╬─ųąöMęįĄ┌50░┘Ęų╬╗×ķ└²Ż¼ī”Ą┌5Ż¼5╝░95░┘Ęų╬╗Ą─±{±éåT▀Mąąū°ū╦╩µ▀mąįĪó▓┘┐v┼_┐╔▀_ąįęį╝░╣żū„ęĢę░Ę┬šµĘų╬÷┼c蹊┐ĪŻ
2.1 ū°ū╦╩µ▀mąįįuār
Ė∙ō■įć“×ųąū∙ę╬Īó╠ż░ÕĪóĘĮŽ“▒PĄ─┐šķg▓╝ų├ęį╝░š²│Ż±{±éĀŅæBŽ┬ū╦ä▌ģóöĄĄ─▓╗öÓūā╗»┐╔ęį½@Ą├±{±éåTĄ─╩µ▀mģ^ė“.▓╔ė├CATIA▄ø╝■╚╦ÖC╣ż│╠─ŻēKHPA(humanpostureanalysis)╣żŠ▀įOČ©▓óš{╣Ø╚╦¾w─Żą═Ą─Ė„ĘNū╦ä▌ęį▒Ń▀MąąĘų╬÷ĪŻ─¼šJūįė╔Č╚╔ŽŻ¼Ė∙ō■╔·└ĒŪķør║═▓┘┐v╩µ▀mįŁät┐╔īó╚╦¾w─Żą═Ą─č█ĪóŅiĪóąžĪóč³ūĄĪó╔Ž▒█ĪóŽ┬▒█Īó┤¾═╚ĪóąĪ═╚Īó╩ų═¾║═─_═¾Ą╚▓┐╬╗ĘųäeäØĘų×ķ5éĆģ^ė“Ż¼▓óĮY║Ž╩µ▀mĮŪČ╚ėĶęįįuĘųĪŻūŅ║¾Ż¼└¹ė├HPA─ŻēKįOų├±{±éåT─Żą═Ė„▓┐╬╗Ą─╩ū▀xĮŪČ╚Ż¼▓óĖ∙ō■±{±éåT«öŪ░ū╦æBŽ┬Ė„ūįė╔Č╚╦∙į┌╬╗ų├╝░ī”æ¬ĘųųĄ▀Mąą╝ėÖÓ▓ÕųĄ▀\╦ŃŻ¼½@Ą├įu╣└ĮY╣¹Ż¼įuĘųįĮĖ▀ät▒Ē╩Š╩µ▀mąįįĮ║├ĪŻ±{±éåTĄ─ū╦æBĘų╬÷ł¾Ėµ╚ńłD4╦∙╩ŠĪŻ
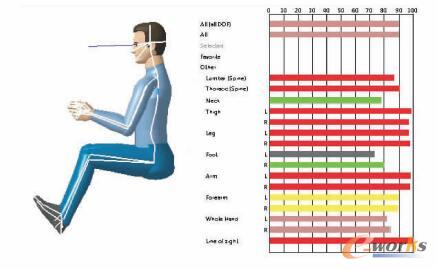
łD4 ±{±éåTĄ─ū╦æBĘų╬÷ł¾Ėµ
łD4ųą╝t╔½▒Ē╩Š95Ęųęį╔ŽŻ¼³S╔½▒Ē╩Š90ų┴95ĘųŻ¼ŠG╔½▒Ē╩Š80ų┴90Ż¼╗ę╔½▒Ē╩Š70ų┴80Ż¼░ū╔½▒Ē╩Š60ĄĮ70ĪŻė╔łD┐╔ęŖŻ¼╚╦¾w┤¾▓┐Ęų▓┐╬╗╠Äė┌╩µ▀mĀŅæBŻ¼╔┘öĄ▓┐╬╗└²╚ń─_═¾ĪóŅi▓┐Ą├Ęųį┌80ĘųęįŽ┬Ż¼šf├„┤╦▓┐╬╗į┌«öŪ░ū°ū╦Ž┬▓╗╠½╩µ▀mĪŻ
2.2 ▓┘┐v┼_┐╔▀_ąįĘ┬šµ
└¹ė├╚╦ÖC╣ż│╠─ŻēKųąĄ─ManikinTools╣żŠ▀Śl╔ŽĄ─╩ų╔ņ╝░Įń├µėŗ╦Ń╣”─▄╝┤┐╔ī”š²│Ż±{±éĀŅæBŽ┬Ą─▓┘┐v┼_┐╔▀_ąį▀MąąĘ┬šµĘų╬÷Ż¼ī”ū¾ėę╩ų┐╔▀_ąį▀Mąą─ŻöMŻ¼ĮY╣¹╚ńłD5╦∙╩ŠĪŻ
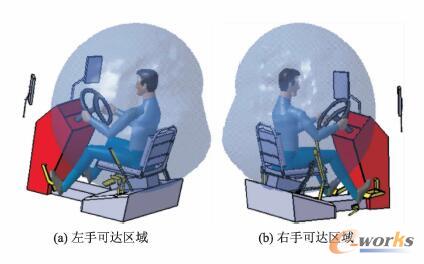
łD5 ╚╦¾w─Żą═┐╔▀_ģ^ė“Ę┬šµ
ė╔łD5┐╔ęŖŻ¼ū¾Īóėę╩ų┐╔▀_ĘČć·╗∙▒ŠĖ▓╔wā╔é╚╦∙ėą▓┘ū„čbų├Ż¼ØMūŃ▓┘ū„┐╔▀_ģ^ė“ę¬Ū¾Ż¼šf├„įō±{±é╩ę▀mæ¬ąį┴╝║├Ż¼ī”Ą┌5░┘Ęų╬╗Ą─╚╦¾w─Żą═įOėŗ▌^×ķ║Ž└ĒĪŻ
«öī”Ą┌5░┘Ęų╬╗±{±éåT─Żą═▀MąąĘ┬šµĢrŻ¼ė╔ė┌Ųõ▒█ķL▌^Č╠Ż¼ū¾╩ų┐╔▀_ąįät╔į▓ŅŻ¼Ą½ų„ę¬▓┘┐vį¬╝■╚įį┌ū¾╩ų┐╔▀_ģ^ė“ā╚Ż¼ę“┤╦Å─┐é¾wüĒšfŻ¼Ųõ┐╔▀_ąį╚įØMūѱ{±é╗∙▒Šę¬Ū¾ĪŻĄ┌95░┘Ęų╬╗▌^50░┘Ęų╬╗Ė▀┤¾Ż¼┐╔▀_ąįĘ┬šµĮY╣¹ūį╚╗ā×ė┌Ą┌5░┘Ęų╬╗╚╦¾w─Żą═ĪŻ
2.3 ±{±éåT╣żū„ęĢę░Ę┬šµ
ģóššGB/T3871.7—2006ĪČ▐rśI═Ž└ŁÖCįć“×ęÄ│╠ĪĘŻ¼▓ó└¹ė├╚╦ÖC╣ż│╠─ŻēKųąĄ─ęĢę░Ż©vision)╣żŠ▀Ż¼╝┤┐╔ī”±{±éåTĄ─äėæBęĢę░▀Mąą─ŻöM┼cĘ┬šµ.ī”ė┌╦∙Į©┴óĄ─╚╦¾w─Żą═Ż¼ŲõŅ^▓┐┐╔ę└┐┐▓▒ŅiĄ─┼żäėĘųäeį┌╔ŽŽ┬Īóū¾ėęā╔éĆūįė╔Č╚ĘĮŽ“╔Ž▐Däėę╗Č©Ą─ĮŪČ╚Ż¼ę“Č°┐╔▀Mąą╚½ĘĮ╬╗ęĢę░Ę┬šµ▓┘ū„ĪŻ
±{±éåT╣żū„ęĢę░Ę┬šµĮY╣¹╚ńłD6╦∙╩ŠĪŻŲõųąŻ¼░ū╔½▓┐Ęų×ķļpč█┐╔ęŖģ^ė“Ż¼ĻÄė░▓┐Ęų×ķå╬č█┐╔ęŖģ^ė“Ż¼║┌╔½▓┐Ęų┤·▒Ē±{±éåT¤oĘ©┐┤ęŖĄ─ģ^ė“.ė╔łD┐╔ęŖŻ¼Ą┌5░┘Ęų╬╗±{±éåTŪ░ĘĮ┬Ę├µĪóāx▒Ēęį╝░╝ė╦┘╠ż░ÕĄ╚Š∙į┌┐╔ęĢĘČć·ų«ā╚Ż¼±{±é╩ęū¾ėęā╔é╚Ą─═ŌĮńģ^ė“ę▓╠Äė┌╚╦¾wū¾ėęęĢę░ĘČć·ų«ā╚ĪŻ
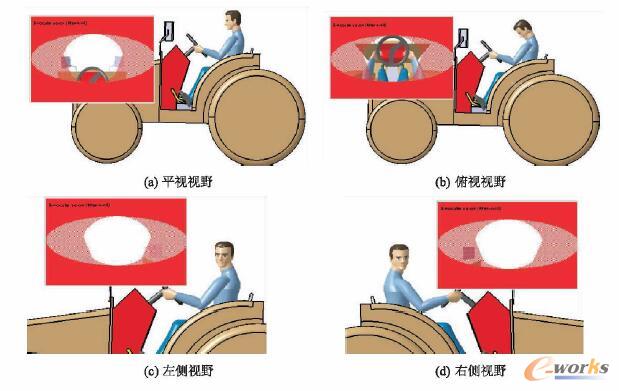
łD6 ±{±éåTęĢę░Ę┬šµ
3 ĮY╣¹Ęų╬÷┼cįuār
ŠC╔ŽĘų╬÷Ż¼LX854═Ž└ŁÖC±{±é╩ęĄ─▀mæ¬ąį┴╝║├Ż¼Ą½ī”ė┌¾wą═╔įąĪĄ─±{±éåT╩µ▀mąį¾w“×▌^ŲĮŠ∙¾wą═±{±éåT┬į▓ŅŻ¼į┌▓┘┐v┼_┐╔▀_ąįĘĮ├µ╚į┤µį┌ų°ę╗Č©Ą─╚▒Ž▌ĪŻī”ė┌¾wą═▌^┤¾Ą─±{±éåTüĒšfŻ¼ļm╚╗Ųõ▓┘┐v┼_┐╔▀_ąįØMūѱ{±éąĶŪ¾Ż¼Ą½╩Ūė╔ė┌¾wą═▀^┤¾Ż¼į┌±{±é╩ęā╚╚╦ū∙║¾Ģ■ĖąėXōĒöD.Ą½╩Ū×ķØMūŃ╦∙ėą¾wą═±{±éåTĄ─╩µ▀mąįąĶŪ¾Ż¼ų╗─▄═©▀^Ā▐╔³ąĪ▓┐Ęų¾wą═±{±éåT▓┐ĘųĘĮ├µĄ─ņoæB╩µ▀mąįęį▀_ĄĮ╩µ▀mąįįOėŗ─┐ś╦ĪŻ
┤╦═ŌŻ¼═Ž└ŁÖC±{±é╩ę┐é¾wįOėŗļmęč▀_ĄĮ╩µ▀mąĶŪ¾Ż¼Ą½Å─3ĘN▓╗═¼░┘Ęų╬╗±{±éåTĄ─ū°ū╦Ęų╬÷ĮY╣¹ųą┐╔ęį┐┤│÷Ż¼ŲõŅi▓┐Ą├ĘųŠ∙į┌80ĘųęįŽ┬Ż¼├„’@Ą═ė┌Ųõ╦¹▓┐╬╗Ą├ĘųŻ¼▒Ē├„Ņi▓┐▓╗╩µ▀må¢Ņ}ęč│╔×ķ▓╗═¼¾wą═±{±éåTĄ─╣▓ąįå¢Ņ}.×ķĖ─╔Ų┤╦å¢Ņ}Ż¼ęįĄ┌50░┘Ęų╬╗±{±éåT╚╦¾w─Żą═×ķ└²Ż¼ĮY║ŽīŹļH±{±éŪķør┼c╔·└ĒīW╔ŽĄ─Ņi▓┐╩µ▀mģ^ė“ī”įō╚╦¾w─Żą═į┌š²│Ż±{±éĀŅæBŽ┬Ą─Ņi▓┐╬╗ų├▀Mąąš{š¹Ż¼š{š¹Ū░Ą─Ņi▓┐ĮŪČ╚×ķ0°Ż¼š{š¹║¾Ą─Ņi▓┐ĮŪČ╚×ķ10°ĪŻš{š¹║¾Ą─ū°ū╦Ęų╬÷ł¾Ėµ’@╩ŠŻ¼Ņi▓┐║═┐é¾wĄ├ĘųŠ∙Ą├ĄĮę╗Č©Ą─╠ßĖ▀Ż¼Ą½╩Ū┤╦ĢrŲĮęĢĄ─ęĢę░ĘČć·▓╗─▄▒ŻūC±{±éåT─▄ŪÕ│■Ąž┐┤ęŖŪ░ĘĮĄ└┬ĘŪķørŻ¼ę“┤╦±{±éåT×ķ▒ŻūC±{±é░▓╚½▒žČ©Ģ■š{š¹ęĢŠĆĮŪČ╚Ż¼Įø▀^įć“×Ę┬šµę╗░ŃŪķørŽ┬ęĢŠĆ╠¦Ė▀12°ū¾ėęĢręĢę░ĘČć·▓┼─▄ØMūѱ{±éę¬Ū¾.ęĢŠĆš{š¹║¾╚╦¾w─Żą═Ą─ū°ū╦Ęų╬÷ĮY╣¹╚ń▒Ē1╦∙╩ŠŻ¼ęĢę░ĘČć·╚ńłD7╦∙╩ŠĪŻ
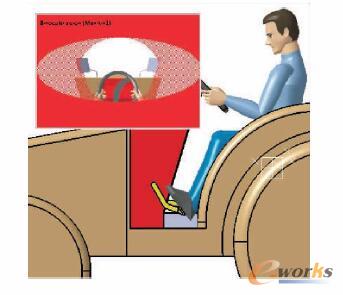
łD7 Ņi▓┐ĮŪČ╚š{š¹║¾Ą─ęĢę░ĘČć·
▒Ē1 Ņi▓┐║═ęĢŠĆĮŪČ╚š{š¹║¾Ą─ū╦æBĘų╬÷ł¾Ėµ
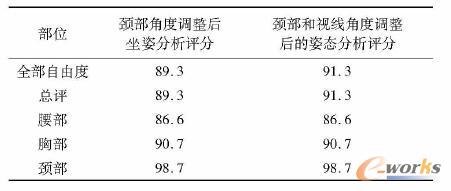
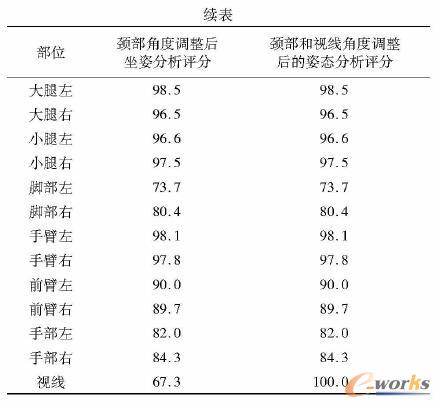
ī”▒╚łD4┼c▒Ē1░l¼FŻ¼ļm╚╗±{±éåTŅi▓┐Ą─╩µ▀mąį┤¾Ę∙╠ßĖ▀Ż¼Ą½ęĢŠĆĄ─╩µ▀mįuĘųģsļSų«ĮĄĄ═Ż¼Č°Ūę┐é¾w╩µ▀mąįĄ├Ęųę▓ėą╦∙£p╔┘.ė╔┤╦šf├„Ż¼×ķīŹ¼Fš¹¾wūŅ╝čĄ──┐ś╦Ż¼ų╗─▄Ā▐╔³▓┐Ęų▓┐╬╗Ą─╩µ▀mąįĪŻ
ŠC╔ŽĘų╬÷Ż¼═Ž└ŁÖC±{±éåTĄ─Ņi▓┐▓╗╩µ▀må¢Ņ}į┌ę╗Č©│╠Č╚╔Ž╩Ū║▄ļy▒▄├ŌĄ─Ż¼ę“┤╦▓╔╚ĪŽÓæ¬Ą─▐kĘ©üĒŠÅĮŌŅi▓┐ŲŻä┌’@Ą├ė╚×ķųžę¬ĪŻģó┐╝Ų¹▄ćū∙ę╬Ņ^šĒĄ─įOėŗĖ┼─ŅŻ¼┐╔ęįį┌═Ž└ŁÖCū∙ę╬╔Ž╠Ē╝ėŅÉ╦ŲĮYśŗŻ¼Ą½╩Ū┐╝æ]ĄĮ═Ž└ŁÖC┼cŲ¹▄ćĄ─╣żū„ŁhŠ│┤µį┌▓Ņ«ÉŻ¼ŅÉ“Ņ^šĒ”ĮYśŗ┼cŲ¹▄ćŅ^šĒŽÓ▒╚│▀┤ńæ¬▒M┴┐ąĪę╗ą®Ż¼Å─Č°£pąĪę“įōĮYśŗČ°ī¦ų┬═Ž└ŁÖC±{±éåT║¾ĘĮęĢę░Ūķørūā▓ŅĄ─┐╔─▄ąįĪŻ
4 ĮYšō
±{±é╩ęĄ─įOėŗī”±{±éåTū„śIĢrĄ─░▓╚½Īó╩µ▀mĪóŲŻä┌ąįęį╝░╣żū„ą¦┬╩Š▀ėąųžę¬ė░ĒæĪŻ▒ŠčąŠ┐ęį¢|ĘĮ╝tLX854ą══Ž└ŁÖC±{±é╩ę×ķ蹊┐ī”Ž¾Ż¼ęįCATIA▄ø╝■ŲĮ┼_×ķ╗∙ĄAŻ¼═©▀^äōĮ©±{±é╩ę╚²ŠSÄū║╬─Żą═┼c┤¾Ļæ─ąąį╚╦¾w│▀┤ńöĄō■╬─╝■Ż¼ėŗ╦Ń╚╦¾wīŹļH³cī”╚╦¾w─Żą═▀MąąČ©╬╗Ż¼Į©┴ó┴╦═Ž└ŁÖCĄ─╚╦ÖCŽĄĮy─Żą═Ż¼▓óęįĄ┌50░┘Ęų╬╗±{±éåT×ķ└²Ż¼Ęųäeī”Ą┌5Ż¼50Ż¼95░┘Ęų╬╗╚╦¾w▀Mąą┴╦ū°ū╦╩µ▀mąįĪó▓┘┐v┼_┐╔▀_ąįęį╝░╣żū„ęĢę░Ę┬šµĘų╬÷┼c蹊┐.ĮY╣¹▒Ē├„Ż¼±{±éåTū°ū╦┼c▓┘┐v┼_┐╔▀_ąįŠ∙ØMūŃ╚╦¾w╩µ▀mąįę¬Ū¾Ż¼±{±éåT╣żū„ęĢę░┴╝║├Ż¼═Ž└ŁÖC±{±é╩ęš¹¾w▓╝Šų║Ž└ĒĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌CATIAĄ─═Ž└ŁÖC±{±é╩ę╚╦ÖCŽĄĮy╩µ▀mąįĘų╬÷┼cįuār
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/news/10515524648.html