



0 ę²čį
▓█▌åÖCśŗ╩Ūę╗ĘN│Żė├Ą─ķgą¬▀\äėÖCśŗ,į┌Ė„ŅÉūįäė╗»ÖCąĄųą╩╣ė├ÅVĘ║Ż¼ė╚Ųõ╩ŪĦėą▐D▒P╣żū„┼_Ą─ūįäė░³čbÖCĪóūįäė╣ÓčbÖCĄ╚įOéõųąĪŻ─┐Ū░▓█▌åÖCśŗĮ©─Żų„ę¬ėąā╔ŅÉĘĮĘ©Ż¼Ą┌ę╗ŅÉ╩Ūų▒ĮėĮ©─ŻŻ¼ī┘ė┌ūįĄūŽ“╔ŽĄ─įOėŗĘĮĘ©Ż¼╝┤Ž╚Į©┴ó┴Ń╝■─Żą═į┘Į©┴óčb┼õ─Żą═ĪŻ┤╦ĘNĘĮĘ©▓╗┐╔īŹ¼FģóöĄ╗»Ż¼į┌įOėŗģóöĄūāĖ³╗“š▀░l╔·┴Ń╝■Ė╔╔µĢrŠ═ąĶ꬚{š¹Ż¼ę“┤╦ųžÅ═╣żū„┴┐▌^┤¾Ż¼ą¦┬╩▓╗Ė▀ĪŻĄ┌Č■ŅÉ╩Ū└¹ė├Ė▀╝ēŠÄ│╠šZčį▀MąąČ■┤╬ķ_░lŻ¼┐╔īŹ¼FģóöĄ╗»“īäėŻ¼įOėŗą¦┬╩Ė▀Ż¼Ą½ę╗ŠĆ╣ż│╠╝╝ąg╚╦åTļyęįšŲ╬šĪŻßśī”įōå¢Ņ}Ż¼┐╔└¹ė├ūįĒöŽ“Ž┬Ą─ĘĮĘ©īŹ¼Fę╗ĘN┐ņĮ▌ėąą¦Ūę─▄īŹ¼FģóöĄ“īäėĄ─Į©─ŻĘĮĘ©ĪŻ
ūįĒöŽ“Ž┬įOėŗ╩ŪųĖį┌æ¬ė├3DįOėŗ▄ø╝■▀MąąÖCąĄ▓┐╝■įOėŗ▀^│╠ųąŻ¼Ž╚▀Mąą▓┐╝■š¹¾wĮYśŗĪó┴Ń╝■▓╝Šų╝░ŽÓ╗źķg╬╗ų├ĻPŽĄĄ╚ĘĮ├µĄ─š¹¾w┐╝æ]Ż¼▓óæ¬ė├ŽÓæ¬Ą─║åå╬į¬╦ž(╚ń³cĪóŠĆĪó╗∙£╩├µĄ╚)į┌▄ø╝■ųą▀Mąą▒Ē╩ŠŻ¼ū„×ķ║¾└m╝Ü╣ØįOėŗĄ─“ģóšš”ĪŻūįĒöŽ“Ž┬įOėŗ─▄Å─š¹¾w╝ėęį░č╬šŻ¼į┌įOėŗę╗ķ_╩╝Š═├„┤_┴Ń╝■ų«ķgĄ─ĻPŽĄŻ¼Å─Č°īŹ¼F─Żą═─▄┼cįOėŗģóöĄäėæBŲź┼õĪŻ
ęįSolidWorks▄ø╝■×ķŲĮ┼_Ż¼Å─čb┼õ¾w╚ļ╩ųĘų╬÷▓█▌å║═ō▄▌åĄ─Äū║╬│▀┤ń╝░Äū║╬╝s╩°ĻPŽĄŻ¼Ž╚═©▀^Į©┴ó▓╝Šų╬─╝■üĒČ©┴xįOėŗģóöĄŻ¼į┘└¹ė├ČÓīŹ¾wĘĮĘ©Į©─ŻŻ¼ūŅ║¾ī¦│÷┴Ń╝■─Żą═▓ó▀Mąąčb┼õŻ¼╚ń┤╦š¹éĆÖCśŗĄ─ģóöĄČ╝Å─▓╝Šų╬─╝■ųą└^│ąŻ¼Å─Č°īŹ¼Fš¹╠ūÖCśŗĄ─ģóöĄ╗»ĪŻ
1 ▓█▌åÖCśŗÄū║╬ģóöĄĻPŽĄĘų╬÷
ęįūŅ│Żė├Ą─ÅĮŽ“▓█Š∙ä“Ęų▓╝Ą─═Ō▓█▌åÖCśŗ×ķ└²Ż¼╚ńłD1ĪŻ
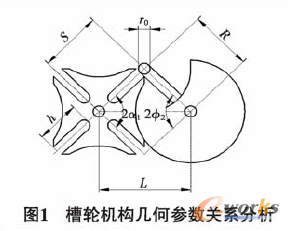
╩ūŽ╚Ė∙ō■╣żū„ę¬Ū¾┤_Č©▓█▌åĄ─▓█öĄZ║═ō▄▌åĄ─õNöĄnŻ╗į┘Ė∙ō■╩▄┴”Ęų╬÷║═īŹļH╦∙į╩įSĄ─░▓čb┐šķgüĒ┤_Č©ųąą─ŠÓL║═łAõN░ļÅĮrĪŻŻ¼ūŅ║¾░┤ššłD1╦∙╩ŠĄ─Äū║╬ĻPŽĄŻ¼╝┤┐╔═Ųī¦│÷Ė„│▀┤ńĄ─Äū║╬ĻPŽĄŻ║
Ųõųąr0æ¬Ė∙ō■ÅŖČ╚ąŻ║╦üĒ╚ĪųĄŻ¼Į©─ŻĢr┐╔Ž╚░┤Įø“×╚Īr=0.1RĪŻ
2 ģóöĄ╗»Į©─ŻŠ▀¾wĘĮĘ©
2 . 1 š¹¾w╦╝┬ĘĘų╬÷
ūįĒöŽ“Ž┬ĘĮĘ©ūŅĻPµIĄ─╦╝┬ĘŠ═╩ŪĘų╬÷Äū║╬ģóöĄ╝░Ė„ĘN╝s╩°Ą─└^│ąĻPŽĄĪŻ
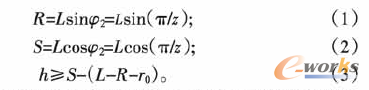
╩ūŽ╚Į©┴óė├ė┌▓╝Šų┴Ń╝■Ė±╩Į╬─╝■ĪŻį┌SolidWorks┴Ń╝■Į©─ŻŁhŠ│ųąŻ¼└¹ė├ĘĮ│╠╩Į┐╔ęįīóų«Ū░═Ųī¦Ą─▓█▌åÄū║╬ĻPŽĄ╝ėęįČ©┴xŻ¼▌oų·▓▌łDĄ─Äū║╬╝s╩°Ż¼┐╔ęįīó▓█▌å║═ō▄▌åų«ķgĄ─ŽÓ╗źĻPŽĄ═Ļ╚½┤_Č©ĪŻ▓╔ė├ČÓīŹ¾wĮ©─ŻĘĮĘ©ĘųäeĮ©┴óā╔š▀īŹ¾w─Żą═Ż¼╝┤į┌═¼ę╗éĆ┴Ń╝■Ė±╩Į╬─╝■ųąīó▓█▌å║═ō▄▌åĮ©│╔2éƬÜ┴óīŹ¾wĪŻ
īó▓╝Šų┴Ń╝■ųąĄ─2éĆīŹ¾wŻ¼Ęųäeī¦│÷▒Ż┤µ×ķ¬Ü┴óĄ─┴Ń╝■─Żą═ĪŻ▀@śė2éĆ┴Ń╝■Ą─öĄō■Š═Å─▓╝Šų┴Ń╝■ųą└^│ąŽ┬üĒŻ¼«ö▓╝Šų┴Ń╝■ųąĄ─ģóöĄūāĖ³ĢrŻ¼┴Ń╝■Š═Ģ■ŽÓæ¬ĄžĖ─ūāĪŻūŅ║¾Į©┴óčb┼õ¾w─Żą═Ż¼░┤šščb┼õĻPŽĄīó▓█▌å║═õN▌å▀Mąąčb┼õŻ¼ė╔┤╦įOėŗöĄō■▀Mę╗▓Į└^│ąĄĮūŅĮKĄ─čb┼õ╬─╝■ųąĪŻčb┼õ═Ļ┐╔ęį└¹ė├öĄūųĘ┬šµ╝╝ągī”įOėŗ╝ėęįĘų╬÷║═“×ūCŻ¼╚½▀^│╠╚ńłD2╦∙╩ŠĪŻ
łD2 ūįĒöŽ“Ž┬Į©─ŻĄ─öĄō■└^│ąĻPŽĄ
2 . 2 ┤_Č©▓╝Šų▓▌łD
ė╔š¹¾w╦╝┬ĘĘų╬÷┐╔ų¬Ż¼▓╝Šų╬─╝■┤_Č©┴╦▓█▌åÖCśŗ╦∙ėąĮ©─ŻģóöĄŻ¼Č°╦∙ėąģóöĄ╝»ųą¾w¼Fį┌▓╝Šų▓▌łDųąĪŻ
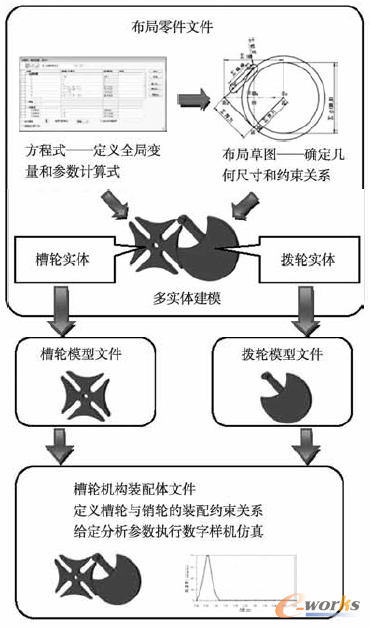
Ž╚į┌ĘĮ│╠╩ĮųąČ©┴x╚½Šųūā┴┐Ż¼LĪóZĪónĪór0ĪóRĪóSĪóhŻ¼Ųõųą│§╩╝ūā┴┐L╚Ī│§ųĄl00Ż¼Z╚Ī4 ĪŻį┘└LųŲ▓╝Šų▓▌łDüĒ┤_Č©▓█▌åĄ─1/Z▓┐Ęų║═ō▄▌åų«ķgĄ─Äū║╬╝s╩°ĻPŽĄŻ¼╚ńłD3(a)╦∙╩ŠĪŻ
▓▌łDŠ▀¾w│▀┤ń║═Äū║╬╝s╩°ĻPŽĄ╚ńŽ┬: 1)ŠĆČ╬ķLČ╚ś╦ūó×ķL ;2)ŠĆČ╬ACķLČ╚ś╦ūó×ķS ;3)ŠĆČ╬BCķLČ╚ś╦ūó×ķR; 4 )▓█┐┌ŠĆīÆČ╚ś╦ūó×ķrĪŻ; 5 )▓█┐┌ŠĆųąą─ŠÓś╦ūó×ķh; 6 )2éĆ═¼ą─łAųąĄ─ąĪłAų▒ÅĮś╦×ķ2·R·0.85ĪŻ
ūŅĮK▓▌łD└LųŲą¦╣¹╚ńłD3(b)╦∙╩ŠĪŻ
2 . 3 ▓█▌åÖCśŗĮ©─Ż▀^│╠
Į©─Ż▀^│╠┐╔Ęų×ķ9éĆ▓Į¾E:1)īóACDŠĆ┐“▐DōQīŹ¾wę²ė├ĄĮą┬Ą─╗∙£╩├µųąŻ¼į┘└Ł╔ņ│╔īŹ¾wŻ¼×ķ▒Ńė┌║¾└mĄ─Ļć┴ą▓┘ū„Ż¼┐╔į┌4 ³c└Ł╔ņę╗éĆąĪłAų∙¾wŻ¼╚ńłD4 (a); 2 )ęį4 ³c×ķųąą─Ż¼ī”╔Žę╗▓Į└Ł╔ņĄ─╚²ĮŪą╬īŹ¾w▀MąąĻć┴ąŻ¼Ļć┴ąéĆöĄ×ķūā┴┐Z Ż¼╚ńłD4(b); 3 )īó▓╝Šų▓▌łDųąĄ─▓█┐┌ŠĆ▐DōQīŹ¾wę²ė├Ż¼▓óęį┤╦ī”╔Žę╗▓ĮĮ©┴óĄ─īŹ¾w▀MąąŪą│²Ż¼╚ńłD4(c);4)ęįA³c×ķųąą─Ż¼ī”╔Žę╗▓ĮŪą│²╠žš„Ļć┴ąŻ¼Ļć┴ąéĆöĄ×ķūā┴┐Z Ż¼╚ńłD4(d);5)īó▓╝Šų▓▌łDųąĄ─ąĪłA▐DōQīŹ¾wę²ė├Ż¼▓óęį┤╦ī”╔Žę╗▓ĮĮ©┴óĄ─īŹ¾w▀MąąŪą│²Ż¼╚ńłD4(e);6)ęįA³c×ķųąą─Ż¼ī”╔Žę╗▓ĮŪą│²╠žš„Ļć┴ąŻ¼Ļć┴ąéĆöĄ×ķūā┴┐Z Ż¼╚ńłD4(f )Ż¼ų┴┤╦▓█▌åīŹ¾węčĮ©│╔;7 )ęįBC×ķłAą─└LųŲ▓█┐┌ŠĆ└Ł╔ņŻ¼į┘ęįC×ķłAą─Ż¼└LųŲ░ļÅĮ×ķr0Ą─łAŻ¼└Ł╔ņą╬│╔õNŻ¼╚ńłD4(g); 8 )īó▓╝Šų▓▌łDųąĄ─ąĪłA▐DōQīŹ¾wę²ė├Ż¼▓ó└Ł╔ņą╬│╔ų╣äėłA╗ĪŻ¼╚ńłD4(h);9)Ė∙ō■Zį┌ų╣äėłA╗Ī╔Žķ_│÷╗Ē┐┌Ż¼╚ńłD4(i);ų┴┤╦Ż¼▓█▌åīŹ¾w║═ō▄▌åīŹ¾węčĮø═Ļ│╔Į©─ŻĪŻ

łD4 Į©─Ż▀^│╠
ūŅ║¾į┘ęįō▄▌åųąą─Ļć┴ąō▄▌åĄ─õN║═ų╣äėłA╗Ī╚▒┐┌2éĆŪą│²╠žš„Ż¼Ļć┴ąéĆöĄ×ķūā┴┐nĪŻĘųäeīó▓█▌å║═ō▄▌å▐D┤µ×ķ2éƬÜ┴óĄ─┴Ń╝■╬─╝■Ż¼į┘▀Mąąčb┼õŻ¼╝┤═Ļ│╔Į©─Ż▀^│╠ĪŻ
2 . 4 ūāĖ³ģóöĄ“×ūC─Żą═
ĘųäeĮoČ©3ĮMģóöĄ“×ūC─Żą═ĪŻĄ┌ę╗ĮM:Z= 4Ż¼n= l ; ;Ą┌Č■ĮM:Z= 6Ż¼n=2ĪŻ├┐┤╬ų╗ąĶį┌▓╝Šų┴Ń╝■╬─╝■Ą─ĘĮ│╠╩Į└’ą▐Ė─ŽÓæ¬Ą─ūā┴┐Ż¼į┘Ė³ą┬─Żą═╝┤┐╔Ż¼╚ńłD5(c)ĪŻ

Įø▀^“×ūCŻ¼┐╔īŹ¼FģóöĄ“īäėĄ─▓█▌åÖCśŗčb┼õ─Żą═Š═ęčĮøĮ©│╔ĪŻ
3 ─Żą═▀\äėĘ┬šµĘų╬÷
╗∙ė┌SolidWorksĄ─motiomĘų╬÷─ŻēKŻ¼┐╔ęį╝░Ģrī”įOėŗĘĮ░Ė▀Mąą▀\äėĘ┬šµĘų╬÷ĪŻī”┤╦Ū░Ą├ĄĮĄ─3ĮM─Żą═Ż¼Š∙ĮoČ©═¼śėĄ─ģóöĄŻ¼ō▄▌å▐D╦┘×ķ12 r/minŻ¼Ę┬šµĢrķg5 SŻ¼▓ķįā▓█▌åĄ─ĮŪ╦┘Č╚Ę┬šµĮY╣¹Ż¼╚ńłD6╦∙╩ŠĪŻ
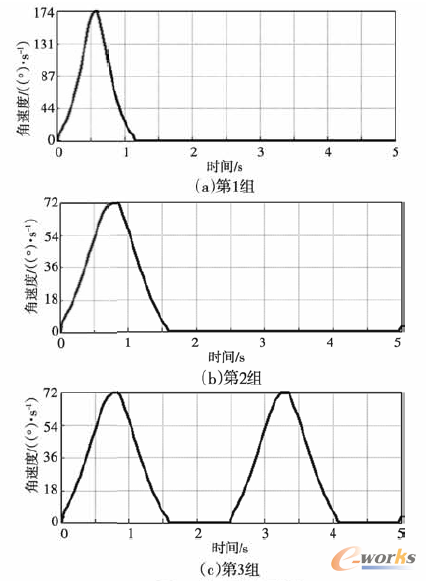
łD6 Ę┬šµĘų╬÷ĮY╣¹
ī”Ę┬šµĮY╣¹▀MąąÜwę╗╗»╠Ä└ĒĪŻō▄▌å▐D╦┘×ķ12 r/minŻ¼╝┤72°/sŻ¼ė╔┤╦┐╔Ą├Z=4ĢrŻ¼▓█▌åūŅ┤¾ĮŪ╦┘Č╚┼cō▄▌åĮŪ╦┘Č╚▒╚ųĄ╝sĄ╚ė┌2.4;«öZ=6ĢrŻ¼▒╚ųĄ╝sĄ╚ė┌1ĪŻĘų╬÷ĮY╣¹┼c╬─½I╬Ū║ŽŻ¼šf├„▒Š╬─╠Į╦„Ą─Į©─ŻĘĮĘ©┐╔▒ŻūCÖCśŗ▀\äėŠ½Č╚ĪŻ
4 ĮYšZ
╗∙ė┌ūįĒöŽ“Ž┬įOėŗĘĮĘ©Ż¼ęįSolidWorks▄ø╝■×ķŲĮ┼_Ż¼Å─▓█▌åÖCśŗčb┼õ¾w╚ļ╩ųŻ¼Ęų╬÷▓█▌å║═ō▄▌åĄ─Äū║╬│▀┤ń╝░Äū║╬╝s╩°ĻPŽĄĪŻūŅĮKīŹ¼F▓█▌åÖCśŗ─Żą═Ą─ģóöĄ╗»“īäėŻ¼▓ó└¹ė├öĄūųĘ┬šµ╝╝ągī”▀\äė╠žąį╝ėęį“×ūCĪŻ╗∙ė┌ūįĒöŽ“Ž┬įOėŗĘĮĘ©Ż¼─▄┤¾Ę∙╠ßĖ▀ą¦┬╩Ż¼ī”ė┌╣ż│╠īŹļHėą║▄¼FīŹĄ─ęŌ┴xĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌ūįĒöŽ“Ž┬Ą─▓█▌åÖCśŗģóöĄ╗»Į©─ŻčąŠ┐
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/solutions/14019321043.html






















