



0 ę²čį
╬’┴„¼FĀŅŻ║žø╬’┼·░l╩ął÷Ż¼╣Ž╣¹╩▀▓╦╗∙ĄžĪó╬’┴„šŠĄ╚ę╗ą®čb▌džø╬’Ą─ł÷╦∙Ż¼▒ž╚╗ąĶę¬╩╣ė├ŲĄ§įOéõ║═░ß▀\įOéõŻ¼įOéõĄ─╩╣ė├śO┤¾Ąž£p▌p┴╦╚╦éāĄ─ä┌äėÅŖČ╚Ż¼╠ßĖ▀┴╦╬’┴„▀\ū„ą¦┬╩║═Ę■äš┘|┴┐Ż¼ĮĄĄ═┴╦╬’┴„│╔▒ŠŻ¼śO┤¾Ąž┤┘▀M┴╦╬’┴„Ą─┐ņ╦┘░lš╣ĪŻ─┐Ū░Ą─ŲĄ§čbų├ų„ę¬ėąĄ§▄ćĪóąą▄ćĪóńP▄ćĄ╚Ż¼┤╦ŅÉ«aŲĘĄ─ā׳c╩ŪŲĄ§┘|┴┐┤¾ĪŻ┐╔ė├ė┌┤¾ą═╗“ųžą═žø╬’ŲĄ§ĪŻĄ½╩Ūī”ė┌ąĪą═╬’┴„ł÷╦∙▌^▌pžø╬’(150kgęįŽ┬)Ą─░ß▀\įOéõ▌^╔┘Ż¼ų„ę¬▀Ć╩Ū╚╦╣żčb▌dŻ¼ä┌äėÅŖČ╚┤¾Ż¼Ūęęū░l╔·░▓╚½╩┬╣╩ĪŻ
░lš╣┌ģä▌Ż║ļSų°¼F┤·╬’┴„Ą─░lš╣ĪŻī”ė┌▀mė├ė┌ąĪ┐šķgŻ¼▌^▌pžø╬’▀\▌dĄ─╬’┴„įOéõąĶŪ¾┴┐į÷┤¾Ż¼ū„×ķŲõ╬’┘|╗∙ĄA▒Ē¼F│÷┴╦ęįŽ┬ĘĮ├µĄ─░lš╣┌ģä▌ĪŻ
1)īŹė├╗»Ż║ī”ė┌▌^▌pžø╬’ł÷║Ž╩╣ė├Ż¼╣żū„▓ó▓╗║▄Ę▒ųžŻ¼ę“┤╦æ¬īŹė├ĪóęūŠSūoĪóęū▓┘ū„ĪŻ
2)▌pą═╗»Ż║▀@ŅÉįOéõ┼·┴┐▌^┤¾Īóė├═ŠÅVĪŻ×ķ┴╦╠ßĖ▀└¹ė├┬╩Ż¼įOéõæ¬▌pą═ĪóęūöyĦĪŻ
3)ŠG╔½╗»Ż║“ŠG╔½”Š═╩Ūę¬▀_ĄĮŁh▒Żę¬Ū¾Ż¼ę¬ėąą¦└¹ė├─▄į┤Ż¼£p╔┘╬█╚Š┼┼Ę┼Ż¼╩╣ė├ŪÕØŹ─▄į┤╝░ą┬ą═äė┴”ĪŻ
ę“┤╦×ķīŹ¼F▌^▌pžø╬’║åęūŲĄ§Ż¼Ēśæ¬╬’┴„░lš╣┌ģä▌Ż¼ķ_░l┴╦ę╗┐Ņą┬ą═Ą─╬’┴„čb▌d▀\▌öįOéõę╗ŲĄ§═Ų▄ćĪŻ
įOėŗ─┐ś╦Ż║ą┬ą═ŲĄ§═Ų▄ćų„ę¬ÖCąĄäėū„╩Ūį┌¬MąĪ┐šķgā╚┐╔░ß▀\žø╬’Ż¼└¹ė├ŲĄ§æę▒█ŲĄ§čb▀\▌^▌pžø╬’(150 kgęįŽ┬)ĪŻŲõųąŻ¼ŲĄ§æę▒█įOėŗĄ─ļyČ╚ūŅ┤¾Ż¼ų„ę¬×ķŻ║1)×ķ╩╣žø╬’į┌žø▀\▄ć▌v╔Žö[Ę┼š¹²RĪóĘĆČ©┐╔┐┐Ż¼æę▒█╔ņ│÷Ą─ąą│╠æ¬ūŃē“ĪŻ2)×ķ┴╦▀mė├ė┌¬MąĪ┐šķgŻ¼Ą§▒█ĮYśŗ▓╗ę╦Å═ļs²ŗ┤¾Ż¼į┌ØMūŃäéČ╚ę¬Ū¾Ž┬Ż¼ĮYśŗæ¬▒M┐╔─▄Šo£ÉĪŻ3)×ķ┴╦ĘĮ▒ŃļS▄ćöyĦŻ¼š¹ÖC┐╔š█»BŻ¼æę▒█┐╔╔ņ┐sŻ¼Ą§▒█╔ņ┐sÖCśŗĄ─įŁäėÖCæ¬▒M┐╔─▄┘|┴┐▌pŻ¼¾wĘeąĪĪŻ4)×ķ╩╣æę▒█ŲĄ§░ß▀\äėū„ņ`╗Ņ┐╔┐┐Ż¼æę▒█╔ņ┐sÖCśŗæ¬▒M┐╔─▄£pąĪ─”▓┴ūĶ┴”Ż¼╠ßĖ▀ą¦┬╩ĪŻ
ę“┤╦ĪŻŲĄ§æę▒█įOėŗĘĮ░Ė╩Ūęį²X▌å²XŚl×ķ╗∙ĄAĄ─╚²╝ē▓Ņäė╔ņ┐sÖCśŗŻ¼ąŅļŖ│žļŖÖC“īäėŻ¼īŹ¼F┴╦īŹė├╗»Īó▌pą═╗»ĪóŠG╔½╗»Īó╣Ø─▄Łh▒ŻĄ──┐ś╦ĪŻ
1 ╣żū„įŁ└Ē
ŲĄ§═Ų▄ćų„ę¬ė╔┐╔╔ņ┐sŲĄ§▒█║═ūįė╔═Ų▄ćŃqĮėĮM│╔Ż«╚ńłD1╦∙╩ŠĪŻūįė╔═Ų▄ćė╔āAą▒ę╗Č©ĮŪČ╚Ą─ų¦ō╬╝▄2Īó╚²ĮŪą╬Ą─║¾▌åų¦╝▄1║═ū¾ėęĘ÷╩ų10ĮM│╔ĪŻų¦ō╬╝▄Ū░Ž┬Č╦čbėąę╗éĆČ©Ž“▌å3Ż¼Ū░Č╦║Ž▀m▓┐╬╗čbėą┐╔š{š¹Ė▀Č╚Ą─╗¼╠ū4Ż¼╗¼╠ū╔ŽčbėąłAÕFØLūė5ęį£p╔┘─”▓┴┴”ĪŻŲĄ§æę▒█7▓╔ė├ļŖÖC“īäėŻ¼æę▒█┼cų¦ō╬╝▄ų«ķg▓╔ė├Ė®č÷š{š¹ÖCśŗ6Ż¼┐╔ęįš{š¹æę▒█ĮŪČ╚Ż¼▓ó└¹ė├ŠĒ═▓õōĮz└KŽĄĮy8ŲĄ§žø╬’ĪŻŲĄ§▒█└¹ė├²X▌å²XŚlŻ¼īŹ¼FŲĄ§▒█Ą─▓Ņäė╔ņ┐sĪŻ

łD1 ŲĄ§═Ų▄ćĮYśŗ╩ŠęŌłD
1.1 ²X▌å²XŚlų▒ŠĆ▓ŅäėÖCśŗĄ─╣żū„įŁ└Ē
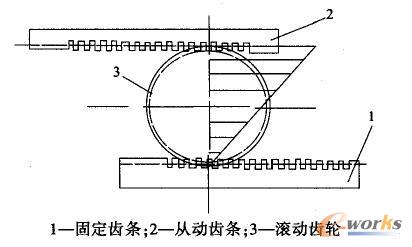
╚ńłD2╦∙╩Š×ķ1éĆØLäė²X▌å┼c2éĆ²XŚlĮM│╔Ą─▓ŅäėÖCśŗŻ¼Å─äė²XŚl2į┌ØLäė²X▌å3Ą─╔ŽĘĮŻ¼Ė∙ō■ŽÓī”▀\äėįŁ└ĒŻ¼ØLäė²X▌å┼c╣╠Č©²XŚlĄ─╣سc×ķČ■š▀Ą─╦┘Č╚╦▓ą─Ż¼«öØLäė²X▌åŽÓī”ė┌╣╠Č©²XŚl1ØLäėĢrĪŻÅ─äė²XŚl2īóčžØLäė²X▌åųąą─▀\äėĘĮŽ“ĪŻęįØLäė²X▌åųąą─2▒ČĄ─╦┘Č╚ŲĮąąęŲäėŻ¼▀@śėŻ¼Š═ą╬│╔┴╦Å─äė²XŚl2ŽÓī”ė┌ØLäė²X▌åųąą─╦┘Č╚┼cąą│╠Ą─į÷▒ČÖCśŗŻ«×ķØMūŃŲĄ§═Ų▄ćæę▒█╔ņ┐sĄ─äėū„ę¬Ū¾╠ß╣®┴╦▒ŻšŽĪŻ
łD2 ²X▌å²XŚl▓ŅäėÖCśŗ
l.2 ╚²╝ē▓Ņäė╔ņ┐sŲĄ§æę▒█Ą─ĮM│╔║═╣żū„įŁ└Ē
×ķ┴╦ØMūŃŲĄ§═Ų▄ćŲĄ§æę▒█Ą─╔ņ┐sąą│╠ę¬Ū¾Ż¼āH▓╔ė├ļpīė²X▌å²XŚl▓ŅäėÖCśŗ╩╣ąą│╠į÷▒Č╩Ū▓╗ē“Ą─Ż¼▀Ć▒žĒÜīŹ¼F╚²╣Ø▒█Ą─ąą│╠į÷▒Čų▒ŠĆ▓ŅäėŻ¼ę“┤╦įOėŗųą▀Ćį÷╝ė┴╦═¼▓Į²Xą╬ĦĪŻ
╚²╝ē▓Ņäė╔ņ┐sĄ─ŲĄ§æę▒█(łD3)Ż¼ė╔╣╠Č©²XŚlŽõl(ę╗╣Ø▒█)Īóųą╗¼░Õ5(Č■╣Ø▒█)ĪóęŲäė²XŚl░Õ8(╚²╣Ø▒█)ĮM│╔ĪŻ╣╠Č©²XŚlŽõ1ŃqĮėį┌ų¦ō╬╝▄╔Ž▓┐Ż¼ųą╗¼░Õ5ėęČ╦čbėą║¾²X▌å3Ż¼║¾²X▌å3ė╔╬óą═ų▒┴„£p╦┘ļŖÖC“īäėŻ«┼c╣╠Č©²XŚlŽõ1ųąĄ─²XŚl2ć¦║ŽĪŻųą╗¼░Õ5ū¾Č╦čbėąŪ░²X▌å6Ż¼Ū░²X▌å6┼c╣╠Č©ė┌ęŲäė²XŚl░Õ8╔ŽĄ─²XŚl9ć¦║ŽĪŻ║¾Ä¦▌å4║═║¾²X▌å3═¼▌SŻ¼Ū░Ħ▌å7║═Ū░²X▌å6═¼▌SŻ¼ā╔š▀═©▀^═¼▓Į²Xą╬Ħé„äėĪŻ
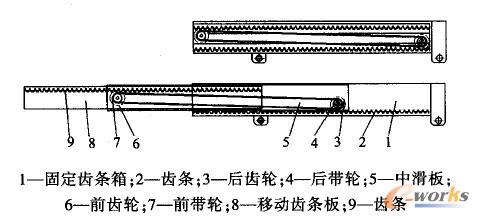
łD3 ╚²╝ē▓Ņäė╔ņ┐sŲĄ§æę▒█įŁ└ĒłD
ū¾Ę÷╩ųŽ┬čbėąæę▒█╔ņ┐sė|³cķ_ĻPŻ¼ų▒Įė┐žųŲļŖäėÖC▐DäėĪŻ«ö╬óą═ų▒┴„£p╦┘ļŖÖC“īäė║¾Ż¼║¾²X▌å3▐DäėŻ¼═©▀^║¾²X▌å3┼c╣╠Č©²XŚlŽõ4ųąĄ─²XŚl2ć¦║Žé„äėŻ¼╩╣║¾²X▌å3ĪóŪ░²X▌å6║═╣╠Č©į┌ā╔²X▌å╔ŽĄ─ųą╗¼░Õ5ę╗ŲŽ“ū¾ęŲäėŻ¼╩╣ųą╗¼░Õ5╔ņ│÷ĪŻ═¼ĢrŻ¼┼c║¾²X▌å═¼▌SĄ─║¾Ä¦▌å4▐Däė║¾Ż¼═©▀^═¼▓Į²Xą╬Ħ“īäėŪ░Ħ▌å7┼c║¾Ä¦▌å4═¼╦┘═¼Ž“▐DäėŻ¼╝┤┼cŪ░Ħ▌å7═¼▌SĄ─Ū░²X▌å6▐DäėŻ¼Ū░²X▌å6┼c╣╠Č©ė┌ęŲäė²XŚl░Õ8╔ŽĄ─²XŚl9ć¦║Žé„äėŻ¼Ä¦äėęŲäė²XŚl░Õ8ŽÓī”ųą╗¼░Õ5Ž“ū¾ęŲäė╔ņ│÷ĪŻ
┼c²X▌å²XŚlé„äėĢrĪŻ╦┘Č╚Īóąą│╠į÷▒ČįŁ└ĒŽÓ═¼Ż¼«öųą╗¼░Õ5╦«ŲĮęŲäėĢrŻ¼═©▀^═¼▓ĮĦé„äėŻ¼ęŲäė²XŚl░Õ8īóčžØLäė²X▌å(║¾²X▌å)3ųąą─▀\äėŽÓ═¼Ą─ĘĮŽ“Ż¼ęįØLäė²X▌å(║¾²X▌å)3ųąą─ā╔▒ČĄ─╦┘Č╚ŲĮąąęŲäėĪŻ▀@śėŻ¼«öų▒┴„ļŖÖC“īäėØLäė²X▌å3╦«ŲĮąąū▀ę╗éĆķLČ╚ąą│╠ĢrŻ¼╝┤┤╦Ģrųą╗¼░Õ5╦«ŲĮęŲäė1éĆķLČ╚ąą│╠Ż║Č°═¼ĢręŲäė²XŚl░Õ8ŽÓī”ųą╗¼░Õ5╦«ŲĮęŲäė1éĆķLČ╚ąą│╠ĪŻ╝┤ŽÓī”╣╠Č©²XŚlŽõ1╦«ŲĮęŲäė┴╦2éĆķLČ╚ąą│╠ĪŻūŅĮKØMūŃ┴╦Ą§▒█╚²╝ē╔ņ┐sĄ─ąą│╠äėū„ę¬Ū¾ĪŻ═¼ĢrŻ¼×ķ┴╦ūŅ┤¾Ž▐Č╚Ą─┐sąĪĄ§▒█ÖCśŗĄ─ĮYśŗ│▀┤ńŻ¼į┌ØMūŃ╦┘Č╚╝░╣”┬╩Ą─╗∙ĄA╔ŽŻ¼▀xė├╬óą═ų▒┴„£p╦┘ļŖÖCŻ¼Ųõ¾wĘeąĪŻ¼┐╔╠ß╣®▌^┤¾▐DŠžĪŻ
▒Ščbų├Ą─įOėŗ└¹ė├²X▌å²XŚlÖCśŗ║══¼▓ĮĦé„äėŻ¼īŹ¼F╣╠Č©²XŚlŽõ1Īóųą╗¼░Õ5ĪóęŲäė²XŚl░Õ8╚²╝ēų▒ŠĆ▓Ņäė╔ņ┐s▀\äėĪŻ
1.3 ╚²╝ē▓Ņäė╔ņ┐sŲĄ§æę▒█ĮYśŗ╠ž³c
į┌╚²╣Ø▒█Ą─╚½▓┐ąą│╠ųąĪŻČ■╣Ø▒█ŽÓī”ę╗╣Ø▒█ąąū▀1éĆąą│╠Ż╗╚²╣Ø▒█ŽÓī”Č■╣Ø▒█ąąū▀1éĆąą│╠Ż¼├┐Č╬╣Ø▒█ų«ķgŠ∙ėą║Ž▀mĄ─ī¦Ž“Įėė|├µķLČ╚Ż¼▒ŻūC╚²╣Ø▒█╔ņ│÷ĢrĄ─ŽÓī”äéČ╚ę¬Ū¾ĪŻ═¼ĢrŻ¼╣Ø▒█×ķ╠ū═▓╩Į╔ņ┐sĮYśŗŻ¼╚²Č╬╣Ø▒█ŽÓī”▀\äėĢrŻ¼▓╔ė├┴╦ØL▌å┼cØLĄ└Ą─╝āØLäė─”▓┴Ż¼ūŅ┤¾Ž▐Č╚Ąž£pąĪ┴╦╣żū„─”▓┴ūĶ┴”Ż¼ķgĮė▒ŻšŽ┴╦ÖCśŗĄ─▀\äėŠ½Č╚║═▀\äėņ`╗ŅąįĪŻ╚²╝ē▓Ņäė╔ņ┐sŲĄ§æę▒█▓╔ė├┴╦²X▌å²XŚlĮM│╔Ą─╚²╝ē▓Ņäėąą│╠į÷▒ČÖCśŗŻ«į┌▒ŻūC╗∙▒Š│▀┤ń▓╗į÷╝ėĄ─╗∙ĄA╔ŽŻ¼┤¾┤¾╠ßĖ▀┴╦ŲĄ§æę▒█Ą─╔ņ┐s╦┘Č╚╝░ŲĄ§Ė▀Č╚ĪŻ
2 ╚²╝ē▓Ņäė╔ņ┐sŲĄ§æę▒█ā×ä▌
2.1 ²X▌å²XŚl╔ņ┐sčbų├
╚ńłD4╦∙╩ŠŻ¼╣╠Č©╣Ø▒█1╔Ž░▓čbėą╣╠Č©²XŚl║═įŁäėÖCę╗ļpŽ“ę║ē║Ėū3Ż¼į┌ę║ē║Ėū╗Ņ╚¹ŚUČ╦░▓čb2éĆ┐╔▐DäėĄ─ØLäė²X▌å4Ż¼ØLäė²X▌å4╔ŽĘĮįOų├ėą╣╠Č©į┌ųąīė╣Ø▒█5╔ŽĄ─Å─äė²XŚlŻ¼ųąķg╣Ø▒█Č╦įOų├ėą2éĆ┐╔▐DĄ─µ£▌åĪŻ
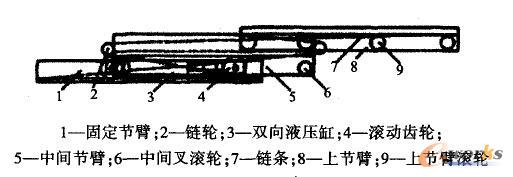
łD4 įŁ└Ē╩ŠęŌłD
2.2 ŲĄ§æę▒█╚²╝ē▓Ņäė╔ņ┐sčbų├ā×ä▌
┼c─┐Ū░╩╣ė├Ą─²X▌å²XŚl╔ņ┐sčbų├ŽÓ▒╚▌^Ż¼╚²╝ē▓Ņäė╔ņ┐sŲĄ§čbų├ėąęįŽ┬ā×ä▌Ż║
1)▓╔ė├ļŖÖC“īäėŻ¼ĘĮ▒ŃŁh▒ŻĪŻ
ęčėąĄ─▌å²X²XŚl╔ņ┐sčbų├×ķę║ē║“īäėŻ«ļm╚╗ę║ē║“īäėĄ─═Ų┴”┤¾Īó¾wĘeąĪĪóš{╦┘ĘĮ▒ŃŻ¼Ą½ŽĄĮy│╔▒ŠĖ▀Ż¼┐╔┐┐ąį▓ŅŻ¼▓╗ęūŠSą▐▒ŻBŻ¼ų„ę¬ė├ė┌žø▓µĄ╚Ųųž┘|┴┐▌^┤¾Ą─ÖCąĄųąŻ¼Č°▒Šæę▒█╔ņ┐sčbų├╩Ūæ¬ė├ė┌Ųųž┘|┴┐ŽÓī”▌^ąĪ(<150 kg)Ą─ŲĄ§═Ų▄ć╔ŽŻ¼▓╔ė├ļŖÖC“īäėŻ¼ą¦┬╩Ė³Ė▀Ż¼│╔▒ŠĖ³Ą═ĪŻ×ķ┴╦ĘĮ▒ŃļS▄ćöyĦŻ¼öU┤¾╩╣ė├ĘČć·Ż¼įOėŗ▓╔ė├ąŅļŖ│ž╠ß╣®äė┴”Ż¼╩╣ė├ĘĮ▒ŃŻ¼Ė³╝ėŁh▒ŻŻ¼Ę¹║Ž╬’┴„įOéõŠG╔½╗»Ą─░lš╣┌ģä▌ĪŻ
2)▓╔ė├═¼▓Į²Xą╬ĦŻ¼ĮYśŗ║åå╬Šo£ÉĪŻ
ęčėąĄ─²X▌å²XŚl╔ņ┐sÖCśŗ▓╔ė├µ£é„äėŻ«╦▓Ģr▐D╦┘║═╦▓Ģré„äė▒╚▓╗╩Ū│ŻöĄŻ¼é„äėĄ─ŲĮĘĆąį▌^▓ŅŻ¼ėąę╗Č©Ą─ø_ō¶║═įļ┬ĢĪŻčbų├įOėŗĢr×ķ┴╦īŹ¼F╦┘Č╚┼cąą│╠ĘŁ▒ČŻ¼▓╔ė├┴╦²X▌å²XŚlĮM│╔Ą─ų▒ŠĆ▓Ņäėąą│╠į÷▒ČÖCśŗ║══¼▓Į²Xą╬Ħé„äėĪŻ═¼▓ĮĦé„äė×ķ═¼▓ĮĦ²X┼c═¼▓ĮĦ▌å²Xų«ķgĄ─ć¦║ŽīŹ¼Fé„äėĪŻā╔š▀¤oŽÓī”╗¼äėĪóé„äė▒╚║ŃČ©ĪóĮYśŗŠo£ÉĪóĦ▒ĪČ°▌pĪóŽÓī”┘|┴┐ąĪĪó┐╣└ŁÅŖČ╚Ė▀Ż¼Ū깦┬╩Ė▀▀_98ŻźĪŻę“┤╦Ż¼▒Š╔ņ┐sčbų├Ė³▀mė├ė┌ŲĄ§═Ų▄ćØMūŃīŹė├╗»Īó▌pą═╗»Ą─ę¬Ū¾ĪŻ
3)▓╔ė├═¼▓Į╔ņ┐sĘĮ╩ĮŻ¼│╔▒ŠĄ═Ż¼ą¦┬╩Ė▀ĪŻ
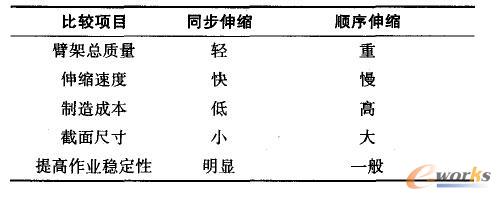
Ą§▒█╔ņ┐sÖCśŗĄ─╔ņ┐sĘĮ╩Į×ķ═¼▓Į╔ņ┐sŻ¼Ė„╣Ø▒█ęįŽÓ═¼Ą─ŽÓī”╦┘Č╚▀Mąą╔ņ┐sĪŻ═¼▓Į╔ņ┐sÖCśŗ┼cĒśą“╔ņ┐sÖCśŗąį─▄ī”▒╚╚ń▒Ē1╦∙╩ŠĪŻ▓╔ė├═¼▓Į╔ņ┐sĘĮ╩ĮĖ³ØMūŃŲĄ§═Ų▄ćĖ▀ą¦┬╩ĪóĄ═│╔▒ŠĪóĘĆČ©ąį║├Ą─ŠC║Žę¬Ū¾ĪŻ
▒Ē1 ═¼▓Į╔ņ┐sÖCśŗ┼cĒśą“╔ņ┐sÖCśŗąį─▄ī”▒╚
3 Į©─Ż
Creo╩Ūę╗┐Ņš¹║Ž┴╦PTC╣½╦ŠĄ─3éĆ▄ø╝■PmŻ»EngineerĄ─ģóöĄ╗»╝╝ągĪóCoCreateĄ─ų▒ĮėĮ©─Ż╝╝ąg║═ProductŻ«ViewĄ─╚²ŠS┐╔ęĢ╗»╝╝ągĄ─ą┬ą═CADįOėŗ▄ø╝■░³Ż¼Š▀éõ╗ź▓┘ū„ąįĪóķ_Ę┼Īóęūė├3┤¾╠ž³cŻ¼─▄ē“×ķė├æ¶įOėŗ│÷Ė╗ėąäōęŌĄ─╚²ŠS«aŲĘĪŻCreo 2Ż«0╩Ū─┐Ū░╣żū„ųąūŅā׹ѥ─2D║═3DCAD▄ø╝■ĪŻ
įOėŗ▓╔ė├CreoParametric2Ż«0▀Mąą╠ōöMįOėŗ┼c╚²ŠSĮ©─ŻŻ¼ī”╔ņ┐sæę▒█▀MąąĮ©─Ż▓╔ė├ūįĄūŽ“╔ŽĄ─ĘĮ╩Į▀MąąŻ«╝┤Ž╚ę└ō■ŽÓĻP┴Ń▓┐╝■Ą─ĮYśŗ║═│▀┤ńĮ©┴óŲ╚²ŠS─Żą═Ż¼į┘▀Mąąčb┼õ¾wĮ©─ŻŻ¼░┤ššĖ„┴Ń▓┐╝■ų«ķgĄ─čb┼õęį╝░╝s╩°ĻPŽĄųéĆ▀MąąĮMčbŻ¼═Ļ│╔╔ņ┐sæę▒█Ą─čb┼õŻ¼┐╔ęį═©▀^Creočb┼õ─Ż╩ĮŽ┬Ą─Ęų╬÷─ŻēKĄ─╚½ŠųĖ╔╔µ├³┴ŅŻ¼ī”æę▒█š¹¾w▀MąąņoæBĖ╔╔µÖz▓ķŻ¼┤_šJ¤oĖ╔╔µŻ¼╚ńłD5╦∙╩ŠĪŻæę▒█Ę┬šµöĄō■┐╔ęį┼cŲõ╦¹CADŽĄĮyöĄō■╣▓ŽĒŻ¼Į©─Ż═Ļ│╔║¾┐╔ęį└¹ė├CreoSimu1ate2Ż«0─ŻēKī”Ą§▒█▀MąąņoæBėąŽ▐į¬Ęų╬÷┼cā×╗»įOėŗ蹊┐Ż¼ę▓┐╔ęįīóĮ©║├Ą──Żą═ī¦╚╦ANSYS▄ø╝■▀MąąėąŽ▐į¬Ęų╬÷ĪŻ
łD5 ╚²ŠSĘ┬šµłD
4 ĮYšZ
ļSų°¼F┤·╬’┴„Ą─░lš╣Ż¼ī”ė┌▀mė├ė┌ąĪ┐šķgŻ¼▌^▌pžø╬’▀\▌dĄ─╬’┴„įOéõąĶŪ¾┴┐į┌╝▒äĪį÷┤¾ĪŻą┬ą═ŲĄ§═Ų▄ć╝╚─▄═Ų╦═žø╬’Ż¼ę▓┐╔čbąČžø╬’ĪŻ▓ó─▄īóžø╬’š¹²RĄž┤aĘ┼į┌žø▄ć╔ŽŻ¼ĮYśŗ║åå╬Ż¼▓┘ū„ĘĮ▒ŃŻ¼▒Ńė┌öyĦŻ¼─▄į┌¬MąĪĄ─ł÷Ąž╩╣ė├Ż¼īŹė├ārųĄŠ▐┤¾ĪŻ╔ņ┐sæę▒█Ą─╔ņ┐sĘĮ╩Į×ķ═¼▓Į╔ņ┐sŻ¼▓╔ė├┴╦²X▌å²XŚlĮM│╔Ą─╚²╝ē▓Ņäėąą│╠į÷▒ČÖCśŗĪŻ▓╗āH│╔▒ŠĄ═Ż¼ĘĆČ©ąį║├ĪŻČ°Ūę┤¾┤¾╠ßĖ▀┴╦ŲĄ§æę▒█Ą─╔ņ┐s╦┘Č╚╝░ŲĄ§Ė▀Č╚ĪŻ▓╔ė├ąŅļŖ│ž╠ß╣®äė┴”Ż¼ĘĮ▒ŃŁh▒ŻŻ¼ĮYśŗ║åå╬Šo£ÉŻ¼╠žäe▀mė├ė┌ąĪą═ŲĄ§čbų├ĪŻ╚²╝ē▓Ņäė╔ņ┐sæę▒█ÖCśŗĄ─æ¬ė├×ķ═¼ŅÉ«aŲĘįOėŗ╠ß╣®┴╦ģó┐╝ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║ą┬ą═ŲĄ§═Ų▄ć╚²╝ē▓Ņäė┐╔╔ņ┐s╩Įæę▒█Ą─įOėŗ
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/solutions/14019324604.html





















