ę²čį
▄ć╬╗Öz£y╝╝ąg╩ŪųŪ─▄═Ż▄ćł÷╣▄└ĒŽĄĮyųąĄ─ĻPµI╝╝ągŻ¼┼c¼FėąĄ─ĄžĖąŠĆ╚”Īó╝t═ŌŠĆ║═│¼┬Ģ▓©Ą╚Öz£y╝╝ągŽÓ▒╚ó¾Ż¼ęĢŅlÖz£y╝╝ągŠ▀ėąÖz£yŲ„░▓čbĘĮ▒ŃĪóęūė┌ŠSūoŻ¼¤oąĶŲŲē─┬Ę├µŻ¼ī”ų▄ć·ŁhŠ│ø]ėąė░ĒæĄ╚ā×ä▌Ż╗łDŽ±Ą─ą┼Žó┴┐žSĖ╗Ż¼ęĢŅl▒O£yų▒ė^┐╔┐┐Ż¼¼Fęč▒╗ųØu╩╣ė├ĪŻ
1 ═Ż▄ćł÷▄ć╬╗ęĢŅlÖz£y╝╝ąg
ė╔ė┌Ų¹▄ćĘNŅÉĪóą╬ĀŅĪó┤¾ąĪĪóŅü╔½Ė„«ÉŻ¼ų▒Įėī”½@╚ĪĄ─łDŲ¼▀MąąĘų╬÷┼ąöÓ▄ć╬╗╩Ūʱ┐šķeŽÓ«öÅ═ļsŻ¼ī”ŽĄĮyā╚┤µ║═▀\╦Ń─▄┴”ę¬Ū¾Ė▀ĪŻ╚¶į┌═Ż▄ć╬╗«ŗę╗éĆ╠žš„łAŻ¼į┌ą▒Ū░ĘĮī”įō─┐ś╦łA▀MąąęĢŅlÖz£yĪŻ«öłDŲ¼ųąø]ėą─┐ś╦łAŻ¼▒Ē├„įō▄ć╬╗▒╗š╝ė├Ż¼Ę±ät▄ć╬╗┐šķeĪŻė╔ė┌┼─özĮŪČ╚å¢Ņ}Ż¼╠žš„łA▒╗┼żŪ·│╔ÖEłAŻ¼ūŅĮKī”┐šķe▄ć╬╗Ą─Öz£y▐D╗»×ķī”łDŲ¼ųą╩Ūʱ║¼ėąÖEłAĄ─Öz£yĪŻįōĘĮĘ©║åå╬Ż¼ėŗ╦Ń╦∙ąĶꬥ─┘Yį┤╔┘Ż¼Öz£y╦┘Č╚┐ņĪŻ
1.1 ═Ż▄ćł÷ęĢŅlÖz£y
▒Š╬─▓╔ė├USBözŽ±Ņ^ī”═Ż▄ć╬╗▀MąąęĢŅl▓╔╝»Ż¼═©▀^łDŽ±╠Ä└Ē╝╝ągŻ¼ī”ÖEłA╠žš„ą┼Žó▀Mąą╠ß╚ĪŻ¼┤_Č©═Ż▄ć╬╗Ą─╩╣ė├ŪķørŻ¼╚ńłD1╦∙╩ŠĪŻ┼cözŽ±Ņ^▒╗░▓Ę┼į┌┤²Öz£y▄ć╬╗Ą─š²╔ŽĘĮ(╚ńözŽ±Ņ^1)ŽÓ▒╚Ż¼░čözŽ±Ņ^░▓Ę┼į┌▄ć╬╗Ą─ą▒Ū░ĘĮ═©▀^į÷╝ėŲ½ęŲĮŪČ╚║═┼─özŠÓļxį÷┤¾┐╔ęĢĘČć·Ż¼½@╚ĪĖ³ČÓĄ─Öz£y▄ć╬╗(╚ńözŽ±Ņ^2)ĪŻ
łD1 ═Ż▄ć╬╗┼─öz╩ŠęŌłD
1.2 ÖEłAÖz£y╦ŃĘ©
×ķ┴╦╝ė┐ņÖEłAÖz£y╦┘Č╚Ż¼╠ßĖ▀Öz£yĄ─£╩┤_ąįŻ¼╚¶▓╔ė├é„ĮyHoughūāōQ║═ļSÖCHouŪ·ūāōQĄ╚ĘĮĘ©ī”łDŲ¼ųąĄ─ÖEłA▀MąąÖz£yŻ¼ąĶę¬▌^ķLĄ─▀\╦ŃĢrķgŻ¼▓óŪęąĶꬎ¹║─▌^ČÓĄ─ā╚┤µĪŻ─┐Ū░▓╔ė├▌^ČÓĄ─ĘĮĘ©╩ŪļSÖCÖEłAÖz£yĘ©Ż¼ŲõĮY║Ž┴╦ūŅąĪČ■│╦Ę©║═ļSÖCÖz£yĄ─ĘĮĘ©┐╔ęį┐ņ╦┘Öz£yČÓéĆÖEłAŻ¼įōĘĮĘ©ąĶę¬ļSÖC▓╔śė6éĆ³cī”ÖEłA▀MąąÖz£yŻ¼6éĆ³c═¼Ģr┬õį┌═¼ę╗éĆÖEłA╔ŽĄ─Ė┼┬╩ąĪŻ¼ī¦ų┬▌^ČÓĄ─¤oą¦▓╔śėŻ¼į÷╝ė┴╦╦ŃĘ©Ą─ĢrķgÅ═ļsČ╚ĪŻę“┤╦Å─╠Ä└Ēą¦┬╩║═╣Ø╩Ī─▄į┤ā╔ĘĮ├µ┐╝æ]Ž▐ųŲ┴╦╦ŃĘ©į┌ŪČ╚ļ╩Į═Ż▄ćł÷▄ć╬╗īŹĢr╣▄└ĒĄ─ąĶŪ¾ĪŻ
▒ŠŽĄĮyį┌ļSÖCūŅąĪČ■│╦Ę©öM║ŽĄ─╗∙ĄA╔ŽŻ¼╗∙ė┌ÖEłAĄ─ųąą─ī”ĘQ╠žąį║═ą²▐D▓╗ūāąį▀MąąÖEłA▀ģŠē³cÖz£yH1Ż¼╠ßĖ▀┴╦▓╔śė³c┬õį┌═¼ę╗éĆÖEłA╔ŽĄ─Ė┼┬╩Ż¼╦∙ąĶꬥ─ėŗ╦Ń┴┐ąĪŻ¼ūā┴┐╔┘Ż¼┐╔ęį╩╣ė├ā╚┤µ▌^ąĪĄ─ähŽĄĮyĪŻ
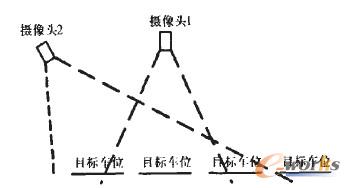
╚ńłD2╦∙╩ŠŻ¼ÖEłA╩Ūę╗ĘN┤µį┌ā╔Ślš²Į╗ī”ĘQ▌SĄ─łDą╬Ż¼═©▀^łDą╬ųąą─Ą─ų▒ŠĆ┼c▀ģĮńĄ─ā╔éĆĮ╗³cP1║═P2╗ź×ķī”┼╝³cŻ¼Ųõ═ŌĘ©ŠĆĘĮŽ“ŽÓĘ┤Ż¼ŪąŠĆą▒┬╩ŽÓĄ╚ĪŻ«öłDą╬╗“łDŽ±░l╔·ŲĮęŲĪó┐sĘ┼╗“ą²▐D║¾Ż¼ī”┼╝³c╚į╚╗╗ź×ķī”┼╝³cŻ¼╝┤ĻPė┌ÖEłAųąą─Ą─ī”ĘQ╠žąį║═ą²▐D▓╗ūāąįĪŻ
łD2ÖEłA╔Žī”┼╝³c╩ŠęŌłD
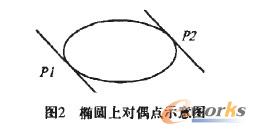
ī”½@╚ĪĄ─łDŲ¼▀MąąŅA╠Ä└ĒĪŻ╩ūŽ╚īółDŲ¼▐DōQ│╔╗ęČ╚łDŽ±Ż¼╚╗║¾ī”łDŲ¼▀MąąĖ▀╦╣×V▓©╚ź│²įļ┬ĢŻ¼▓óŪę▀MąąČ■ųĄ╗»╠Ä└ĒŻ¼╩╣ė├Canny╦Ńūė╠ß╚Ī▀ģŠē½@╚ĪłDŽ±Ą─▀ģŠē³c╝»EĪŻ
į┌▀ģŠē³cųąŻ¼╗∙ė┌ÖEłAĄ─ą²▐D▓╗ūāąįŻ¼└¹ė├ī”┼╝³cŪąŠĆą▒┬╩ŽÓĄ╚Ą─ąį┘|▀x╚Īī”┼╝³cŻ¼ę└┤╬▀x╚Ī3ī”ī”┼╝³cŻ¼╣▓6éĆ³cŻ¼╩╣ė├ūŅąĪČ■│╦Ę©öM║Ž╦ŃĘ©öM║Žę╗éĆÖEłAĪŻ×ķ┴╦Ą├ĄĮ▌^║├Ą─öM║Žą¦╣¹Ż¼▓╔śėī”┼╝³cę¬┐╝æ]Š∙ä“Ęų▓╝Ż¼▀x³cĢr╩╣ė├ŠÓļxķōųĄŽ▐ųŲĪŻ
┴Ē═ŌŻ¼ė╔ė┌įļ┬ĢĖ╔ö_Ż¼öM║ŽĄ├ĄĮĄ─ÖEłA╬┤▒ž╩ŪšµīŹÖEłAĪŻ▓╔ė├8ÓÅė“┼“├øĘ©Įyėŗ┬õį┌┤╦ÖEłA╔ŽĄ─▀ģŠē³cöĄ─┐N║═ÖEłAĄ─ų▄ķLL“×ūC┤╦ÖEłA╩Ūʱ×ķšµīŹÖEłAĪŻĖ∙ō■Ž╚“×ų¬ūRŻ¼«öNŻ»L<oŻ«9ĢrŻ¼ät┤╦ÖEłA×ķ╠ō╝┘ÖEłAŻ¼Ę±ät×ķšµīŹÖEłA▓óÅ─▀ģŠē³c╝»ųą╠▐│²┬õį┌ÖEłA╔ŽĄ─▀ģŠē³cĪŻ┼ąöÓ╩ŻėÓ▀ģŠē³cĄ─öĄ─┐Ż¼╚ń╣¹╩ŻėÓ³cöĄ▀^╔┘Ż¼ätšJ×ķ╩ŻėÓ³cöĄ▓╗ūŃęįśŗ│╔ę╗éĆÖEłA═╦│÷Öz£yŻ¼Ę±ät└^└m▀MąąÖz£yĪŻÖEłAÖz£y╦ŃĘ©┴„│╠╚ńłD3╦∙╩ŠĪŻ
łD3łDŽ±ÖEłAÖzõĖ╦ŃĘ©┴„│╠
2 ŽĄĮyė▓╝■ŲĮ┼_
ŽĄĮy▓╔ė├FriendlyARM╣½╦ŠĄ─įęny6410ķ_░l░Õ×ķė▓╝■ŽĄĮyŻ¼ęįLinux▓┘ū„ŽĄĮy×ķ▄ø╝■ŽĄĮyśŗĮ©═Ż▄ć╬╗ęĢŅlīŹĢrÖz£yŲĮ┼_ĪŻŽĄĮyė▓╝■ŲĮ┼_▓╔ė├s3c6410A╠Ä└ĒŲ„Ż¼ų„Ņl×ķ533MHzŻ¼░Õ▌d256M DDR RAM║═256M SLCNand═¼ashŻ¼Š▀ėąĖ▀ąį─▄ĪóĄ═╣”║─Īó¾wĘeąĪĪóĮė┐┌žSĖ╗Ą╚ā׳cĪŻÄ¦ėąęį╠½ŠWĮė┐┌║═USBų„Å─Įė┐┌Ż¼LCD▓╔ė├43┤ńė|├■Ų┴Ż¼ė├ė┌¼Fł÷▒O┐žą¦╣¹Ą─š{įćĪŻ▓╔ė├USBözŽ±Ņ^Ż¼Ęų▒µ┬╩×ķ130╚fŽ±╦žŻ¼═©▀^V4L2Ą─“īäė│╠ą“┐žųŲözŽ±Ņ^▀Mąą┼─özĪŻįö╝Üā╚╚▌ģó┐┤FriendlyARM╣½╦ŠĄ─Tiny6410ė▓╝■šf├„╩ųāįĪŻ
3 ŽĄĮy▄ø╝■ŲĮŲ╩ĄČ
ŽĄĮy▄ø╝■╗∙ė┌ktelĄ─ķ_į┤ėŗ╦ŃÖCęĢėXÄņ0penCVŻ¼ęį╝░ė├ė┌LinuxĄ─ķ_į┤ęĢŅlįOéõā╚║╦“īäėV4L2įOėŗĪŻ
ŲĮ┼_▓╔ė├NFSŠWĮj╬─╝■ŽĄĮyū„×ķĖ∙╬─╝■ŽĄĮy▀Mąąæ¬ė├│╠ą“ķ_░lŻ¼╩╣ė├NFsīŹ¼FARM░Õ║═PC╔Ž╬╗ÖCų«ķgĄ─öĄō■Į╗ōQĪŻŲõĻPµI╩ŪįOų├║├PC NFSĘ■äš±▀ķ_░l░ÕĄ─åóäėģóöĄŻ¼ģó┐┤Tiny64lO Linuxķ_░lųĖ─ŽĪŻ
│╠ą“╣▓Ęų×ķ╚²éĆ▓┐ĘųŻ║ŽĄĮy┐žųŲ│╠ą“Īó═Ż▄ć╬╗┼─šš│╠ą“║═łDŲ¼Öz£y│╠ą“ĪŻ
3.1 ęĢŅl╝╝ąg
OpenCV╩Ūę╗éĆ┐ńŲĮ┼_ėŗ╦ŃÖCęĢėXÄņŻ¼╦³ė╔ę╗ŽĄ┴ąC║»öĄ║═╔┘┴┐C++ŅÉśŗ│╔Ż¼īŹ¼F┴╦łDŽ±╠Ä└Ē║═ėŗ╦ŃÖCęĢėXĘĮ├µĄ─║▄ČÓ═©ė├╦ŃĘ©▀¶1ĪŻ
į┌ARMųąŠÄūg0pccnCVŻ¼Į©┴ó▀\ąąŁhŠ│ĪŻ═©▀^NFSš{ė├ARMŻ¼į┌ähŽ┬Æņ▌d▒ŠĄž╬─╝■ŖAŻ¼īóOpenCVŽ┬▌dĄĮįō╬─╝■ŖAųąŻ¼ŪąōQĄĮOpcnCVĄ─╬─╝■ŖAŽ┬ę└┤╬▀\ąącon┤ŻgureĪómakeĪómakeinstallųĖ┴Ņ║¾Ż¼īóŠÄūg╔·│╔Ą─lib╬─╝■┐ĮžÉĄĮARMĄ─libĖ∙─┐õøŽ┬Ż¼ęį║¾╩╣ė├┴╦OpenCVĄ─│╠ą“Įø▀^
ŠÄūgų«║¾Š═─▄ē“į┌ARMŽ┬Ēś└¹▀\ąąĪŻ
V4L2(ó÷de04hIlux2)╩ŪUnllxŽ┬ė├ė┌½@╚ĪęĢŅl║═ę¶ŅlöĄō■Ą─ų▌Įė┐┌Ż¼═©▀^╩╣ė├ęĢŅl▓╔╝»įOéõ║═“īäė│╠ą“Ż¼┐╔ęįīŹ¼FęĢŅl▓╔╝»ĪóīŹĢr▓źĘ┼Ą╚╣”─▄▀¾ĪŻį┌├{uxųąęĢŅlįOéõū„×ķįOéõ╬─╝■Ż¼┐╔ęįŽ±įLå¢Ųš═©╬─╝■ę╗śėī”Ųõ▀MąąūxīæĪŻ═©▀^š{ė├V4L2Ż¼╩╣Ą├æ¬ė├│╠ą“ėą░l¼FįOéõ║═▓┘ū„įOéõĄ──▄┴”ĪŻLirIllx×ķözŽ±Ņ^įOéõ╠ß╣®┴╦ę╗ŽĄ┴ąŠÄ│╠Įė┐┌╝░öĄō■Įė┐┌║»öĄŻ¼═©▀^š{ė├▀@ą®║»öĄ┐╔ęį▀Mąą┤“ķ_Ż¼▓Č½@Ż¼ūx╚ĪŻ¼ĻPķ]įOéõĄ╚▓┘ū„Ż¼ęį╝░įOų├ęĢŅl║═łDŽ±ģóöĄĪŻ
3.2 ŽĄĮy┐žųŲ│╠ą“
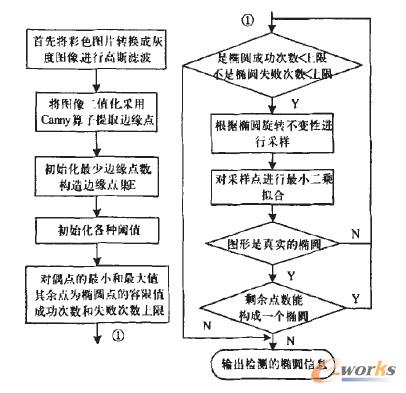
ŽĄĮy┐žųŲ│╠ą“┴„│╠╚ńłD4╦∙╩ŠŻ¼žōž¤ŽĄĮyĄ─▀ē▌ŗŻ¼░³└©ŽĄĮyĄ─│§╩╝╗»Ż¼ŠS│ųŽĄĮyĄ─▀\ąąŻ¼ŽĄĮyĄ─ĻPķ]Ż¼ęį╝░×ķ┼─šš│╠ą“║═ÖEłAÖz£y│╠ą“Ę■äšĪŻ
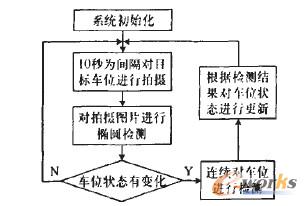
łD4ŽĄĮy┐žųŲ│╠ą“┴„│╠
ī”ŽĄĮyĄ─ĀŅæB▀Mąą│§╩╝╗»║¾Ż¼ĮøÖEłAÖz£y║¾ī”═Ż▄ć╬╗įOų├ę╗éĆś╦ųŠ╬╗Ż¼├┐┤╬«ö▄ć╬╗ūā╗»Ą─Ģr║“Ż¼Ė─ūāįōś╦ųŠ╬╗ĪŻ╝┤├┐┤╬ī”▄ć╬╗ĀŅæB▀Mąą┼ąöÓĄ─Ģr║“Ż¼╩ūŽ╚īóĮY╣¹┼cŽĄĮyųą▒Ż┤µĄ─ĀŅæB▀Mąą▒╚▌^ĪŻ«öÖz£yĮY╣¹░l¼FĀŅæBūā╗»ĢrŻ¼▓╗─▄║åå╬Ą─Ė³Ė─▄ć╬╗Ą─ĀŅæBŻ¼ąĶę¬▀MąąČÓ┤╬Öz£y(5┤╬)Ż¼▓óŪę▓╗į┘ęį10├ļ×ķå╬╬╗▀Mąą┼ąöÓŻ¼Č°╩Ū├┐┤╬Öz£y═ĻŠ═ų▒Įė┼─özŽ┬ę╗ÅłłDŲ¼┼ąöÓŻ¼═©▀^Įyėŗī”Öz£yĮY╣¹┼ąöÓ▄ć╬╗╩Ūʱėąūā╗»Ż¼ęįĘ└š`┼ąĪŻ
3.3 ═Ż▄ć╬╗┼─šš│╠ą“
╩╣ė├V4L2ā╚║╦“īäė│╠ą“Ż¼▓┘ū„özŽ±Ņ^ī”─┐ś╦═Ż▄ć╬╗▀Mąą┼─özŻ¼╚ńłD5╦∙╩ŠĪŻ
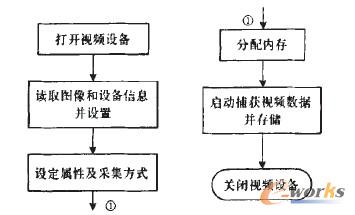
łD5═Ż▄ć╬╗ęĢŅl▓╔╝»łDŲ¼┴„│╠
╩ūŽ╚Ż¼═©▀^š{ė├open()║»öĄ┤“ķ_ęĢŅlįOéõ╬─╝■Ż¼│╔╣”║¾ĘĄ╗žĄ─╬─╝■├Ķ╩÷Ę¹┤·▒Ē▓Č½@Ą─ė▓╝■įOéõI╚╗║¾š{ė├ioctl()║»öĄ├³┴ŅģóöĄ(VIDIoIŻ║GCAPĪóVIDIOCGPIcTĪóVIDIoCGMBUFŻ«VIDIOCSPICTĪóVIDIOC-QUERYSTD)½@╚ĪįOéõą┼ŽóĪó▓╔╝»Ą─łDŽ±ī┘ąįĪółDŽ±ŠÅø_ģ^ļą┼ŽóĪóÖz£y«öŪ░įOéõų¦│ųĄ─ś╦£╩║═įOų├ī┘ąį║═▓╔╝»ĘĮ╩Įl└¹ė├v412jequestbuffersŅÉą═ĮYśŗ¾wūā┴┐×ķęĢŅlįOéõĘų┼õā╚┤µŻ¼╝┤Ęų┼õĄ─ŠÅ┤µöĄ┴┐lš{ā╔éĆioctl()║»öĄ├³┴Ņ(ó÷DIOC—DQBUFĪóó÷DIOC_-QBuF)üĒ½@╚ĪöĄō■Ż╗«öš¹éĆŽĄĮyĄ─╣żū„═Ļ│╔ų«║¾Ż¼š{ė├cIo∞O║»öĄüĒĻPķ]ęĢŅlįOéõĪŻ
3.4 łDŲ¼ÖEłAÖz£y│╠ą“
╗∙ė┌ÖEłAī”ĘQąį║═ūŅąĪČ■│╦Ę©öM║Ž╦ŃĘ©ī”┼─özłDŲ¼▀MąąÖEłAÖz£yŻ¼═©▀^ī”łDŲ¼ųą╩Ūʱ║¼ėąÖEłAüĒ┼ąöÓ▄ć╬╗╩Ūʱ▒╗š╝ė├ĪŻ╦ŃĘ©┴„│╠╚ńłD3╦∙╩ŠĪŻ
ÖEłAÖz£yŽĄĮyėųĘų×ķęįŽ┬╦─éĆ─ŻēKŻ║ŅA╠Ä└Ē─ŻēKĪó▓╔śė─ŻēKĪóūŅąĪČ■│╦Ę©öM║Ž─ŻēK║═ÖEłAĄ─“×ūC─ŻēKĪŻ▌ö╚ļłDŲ¼ę└┤╬Įø▀^╦─éĆ─ŻēK╠Ä└Ēų«║¾Ż¼▌ö│÷łDŲ¼ųą╩Ūʱ┤µį┌╠ŪŲįĪŻĖ„─ŻēK═©▀^ųĖŽ“łDŲ¼Ą─IplImage4ŅÉą═ųĖßśūā┴┐īŹ¼FöĄō■é„▀fŻ¼▀MČ°īŹ¼Fī”łDŲ¼Ą─╠Ä└ĒŻ¼Č°Ūę─ŻēK╗»║¾Ą─│╠ą“▒Ńė┌ą▐Ė─║═╔²╝ē╠Ä└ĒĪŻ
4 įć“×ĮY╣¹╝░Ęų╬÷
įć“×ĢrŻ¼╩ūŽ╚└¹ė├╣Pėø▒ŠęĢŅlæ¬ė├│╠ą“š{š¹║├özŽ±Ņ^Ą─ĮŪČ╚╬╗ų├Ż¼╩╣┼─özĄ─ą¦╣¹ŪÕ╬·┴╝║├Ż¼ęįĘ└ÖEłA╗¹ūā╠½┤¾Ż¼▓╗─▄š²┤_Öz£yĪŻ╚╗║¾░čözŽ±Ņ^▀BĮėĄĮähŽĄĮyŻ¼ī”Ąž├µ═Ż▄ć╬╗▀MąąČÓ┤╬Öz£yŻ¼ė^▓ņ▌ö│÷╩Ūʱš²┤_ĪŻ╚ń╣¹ČÓ┤╬Öz£yĮY╣¹š²┤_Ż¼ätšJ×ķözŽ±Ņ^╬╗ų├╣╠Č©║├ĪŻ
ė╔ė┌ÖEłAÖz£yūŅČÓąĶę¬2├ļŻ¼ę“┤╦ęį10├ļ×ķķgĖ¶▀Mąą┼─özŻ¼┤╦Ņl┬╩┐╔ęįØMūŃ═Ż▄ćł÷Öz£yĄ─ąĶę¬ĪŻ├┐ÅłłDŲ¼┤¾ąĪ×ķ8KBū¾ėęŻ¼ė╔ė┌ŽĄĮyĘų┼õĄ─┤µā”┐šķgėąŽ▐Ż¼▓╗─▄ī”├┐┤╬┼─özĄ─ĮY╣¹Č╝▀Mąą┤µā”Ż¼▓óŪę═Ż▄ćł÷▄ć╬╗Ą─ĀŅæBūā╗»Ņl┬╩▌^Ą═Ż¼ę“┤╦┐╔ęįāHį┌├┐┤╬Öz£yĄĮ▄ć╬╗ūā╗»Ą─Ģr║“ī”«öĢr┼─özĄ─łDŲ¼▀Mąą┤µ┘AĪŻ
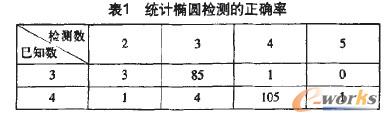
ŽĄĮyī”ļSÖC«a╔·Ą─ČÓÖEłAłD▀Mąą£yįć“×ūCŻ¼╣▓200ÅłłDŲ¼Ż¼├┐ÅłłDŲ¼╔ŽļSÖC«a╔·3ĄĮ4éĆÖEłAĪŻŲõųąŠ▀ėą3éĆÖEłAĄ─łDŲ¼ėą89ÅłŻ¼4éĆÖEłAĄ─łDŲ¼ėąlllÅłĪŻ
4.1 Ė▀╦╣įļ┬Ģī”Öz£yŠ½Č╚Ą─ė░Ēæ
×ķ┴╦Öz£yĖ▀╦╣įļ┬Ģī”Öz£yą¦╣¹Ą─ė░ĒæŻ¼×ķÖEłAłDŲ¼╠Ē╝ė▓╗═¼ĘĮ▓ŅĄ─įļ┬ĢĪŻī”6ÅłłDŲ¼Ęųäe╠Ē╝ėśė▒ŠĘĮ▓Ņ×ķĪŠoŻ«1Ż¼0.3Ż¼1Ż«1Ī┐Ą─┴ŃŠ∙ųĄĖ▀╦╣įļ┬Ģ▀Mąą┴╦īŹ“×ĪŻ╚ńłD6╦∙╩ŠĪŻ

łD6╠Ē╝ėĘĮ▓Ņ×ķOŻ«1║═1Ż«1Ą─Ė▀╦╣įļ┬ĢĄ─╗ęČ╚łD
«öįļ┬ĢĘĮ▓Ņ×ķ0Ż«1ĢrŻ¼łDŲ¼╗ęČ╚╗»ų«║¾ŽÓī”ė┌▒│Š░įļ┬ĢŻ¼ÖEłAĄ─▀ģŠē╚į╚╗║▄ŪÕ╬·Ż¼įļ┬Ģ³cĄ─Ė╔ö_ąĪŻ¼─▄Ēś└¹Ą─╠ß╚Ī│÷▀ģŠēĪŻ«öįļ┬ĢĘĮ▓Ņ1Ż«1ĢrŻ¼łDŲ¼╗ęČ╚╗»ų«║¾ŽÓī”ė┌▒│Š░─┐ś╦ÖEłAęčĮøūāĄ├║▄─Ż║²Ż¼║▄ļyÅ─łDŲ¼ųą╠ß╚Ī▀ģŠēŻ¼įņ│╔▌^┤¾Ą─Öz£yš`▓ŅĪŻę“┤╦ĘĮ▓ŅįĮ┤¾Ż¼─┐ś╦ÖEłAįĮ▓╗ŪÕ╬·Ż¼ī”Öz£yŠ½Č╚ė░ĒæįĮ┤¾ĪŻ
4.2 ŁhŠ│ī”═Ż▄ć╬╗Öz£yŽĄĮyĄ─ė░Ēæ
į┌ī”═Ż▄ćł÷▀Mąą▄ć╬╗Öz£yĄ─▀^│╠ųąŻ¼ė╔ė┌▓╚ē║─źōpŻ¼╣ŌŠĆĄ╚įŁę“Ż¼┤²Öz£yÖEłAĢ■ųØuūāĄ├─Ż║²Ż¼▓╗═¼Ą─╣ŌššŚl╝■ī”─┐ś╦▄ć╬╗Ą─Öz£yę▓ėą║▄┤¾Ą─ė░ĒæŻ¼ę“┤╦ī”▓╗═¼Ą─ūį╚╗ŁhŠ│Ž┬┼─özĄ─łDŲ¼▀Mąą┴╦ĮyėŗĘų╬÷ĪŻÕeš`│÷¼F▌^ČÓĄ─Ūķør╩Ū┐šķe▄ć╬╗▒╗Öz£y│╔š╝ė├Ż¼Č°▄ć╬╗▒╗š╝ė├ĢrŻ¼Öz£yĮY╣¹Ą─š²┤_┬╩╩ŪŽÓ«öĖ▀Ą─ĪŻį┌ė^£yĮŪ▒╚▌^║├Ą─ŪķørŽ┬Ż¼Öz£yš`ł¾┬╩į┌2ŻźęįŽ┬ĪŻį┌ÖEłA═╩╔½╗“▒╗š┌ō§Ą─ŪķørŽ┬Ż¼Öz£yą¦╣¹╚ĪøQė┌╩ŻėÓĄ─ÖEłA▓┐Ęų─▄į┌ČÓ┤¾│╠Č╚╔Ž▒Ż│ųÖEłAĄ─ą╬ĀŅ╠žąįĪŻ╚ń╣¹─┐ś╦ÖEłA╚į─▄▒Ż│ųÖEłAĄ─╗∙▒Šą╬ĀŅŻ¼─Ū├┤─┐ś╦ÖEłAŠ═─▄▒╗Öz£y│÷üĒĪŻĘ±ätŻ¼ŽĄĮy║▄ļy═©▀^▄ć╬╗╔Ž╩ŪʱėąÖEłAüĒ┼ąöÓ▄ć╬╗▒╗š╝ė├Ż¼ąĶę¬ĮĶų·Ųõ╦³łDŽ±╠žš„╦ŃĘ©▀MąąūRäeĪŻ
5 ĮY╩°šZ
▒Š╬─▓╔ė├USBŲš═©özŽ±Ņ^īŹ¼F┴╦═Ż▄ćł÷▄ć╬╗Öz£yŽĄĮyįOėŗŻ¼░³└©ŽĄĮyĮYśŗ║═╗∙▒Š╦ŃĘ©┴„│╠Ż¼ęį╝░Š▀¾wįć“×▀^│╠ĪŻ╩╣ė├ÖEłAī”ĘQąį║═ūŅąĪČ■│╦
Ę©öM║ŽļSÖCÖEłAÖz£y╦ŃĘ©╠ßĖ▀Öz£yą¦┬╩Ż¼ĮĄĄ═┴╦ŽĄĮyÅ═ļsČ╚ĪŻ═©▀^ī”ČÓĘNūį╚╗ŁhŠ│Ž┬Öz£yĮY╣¹’@╩ŠįōŽĄĮy═Ļ╚½─▄æ¬ė├ĄĮīŹļH▄ć╬╗Öz£yŽĄĮyųąĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌łDŽ±Ą─ŪČ╚ļ╩Į▄ć╬╗Öz£yŽĄĮyįOėŗ
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/solutions/1401936969.html