╗∙ė┌DSPĄ─▀h│╠│╠ą“Ė³ą┬ĘĮĘ©║▄ČÓŻ¼Ą½į┌¤²īæĄ─Ģr║“Š∙ę¬Ū¾ŽĄĮy▓╗─▄öÓļŖŻ¼Ę±ätīóįņ│╔š¹éĆŽĄĮy▄ø╝■▒└ØóŻ¼ų╗─▄╚╦╣ż═©▀^JTAG┐┌š{įć¤²īæ▓┼─▄╗ųÅ═ĪŻ╚ń║╬ėąą¦╠ßĖ▀ŽĄĮyŠSūoĄ─┐╔┐┐ąį│╔×ķę╗éĆųžę¬Ą─å¢Ņ}ĪŻ▒Š╬─äōą┬Ąž╠ß│÷╗∙ė┌ČÓDSPĄ─│╠ą“ĘųŲ¼ĪóöĄō■ĘųČ╬Ą─Ė▀┐╔┐┐ąį▀h│╠Ė³ą┬▄ø╝■įOėŗŻ¼▓ó┴ą┼e┴╦ČÓéĆį÷ÅŖ┐╔┐┐ąįĄ─æ¬ė├ĘĮĘ©ĪŻ▒Š╬─ęį─│ą═╠¢¤oŠĆ▀h│╠▒O┐žŽĄĮy×ķ└²Ż¼Š▀¾w├Ķ╩÷įōįOėŗĄ─īŹļHæ¬ė├ĪŻ
1ĪĪŽĄĮyĮYśŗ
▒ŠŽĄĮy╠Ä└ĒöĄō■ČÓŻ¼ėŗ╦Ń┴┐┤¾Ż¼ėųėą║▄ÅŖĄ─īŹĢrąįę¬Ū¾Ż¼▀xė├ADI╣½╦ŠĄ─Ė▀╦┘╠Ä└ĒąŠŲ¼TigerSharc201sĪŻFlash▀xė├JS28F128Ż¼╚▌┴┐×ķ256 MbĪŻŽĄĮyįOėŗ▓╔ė├ā╔Ų¼ADSP▓󹹥──Ż╩ĮĪŻŽĄĮyĮYśŗ╚ńłD1╦∙╩ŠŻ¼TS201A×ķų„DSPŻ¼TS201B×ķÅ─DSPĪŻų„DSPĮøFlash▓╔ė├EPROM╝ė▌dĘĮ╩ĮŻ¼į┘═©▀^Link┐┌ę²ī¦╝ė▌dÅ─DSPĪŻ▒Š╠Ä└ĒŽĄĮyų¦│ųČÓĘN╣żū„─Ż╩ĮŻ¼▒O┐žųąą─═©▀^ā╚▓┐ģfūh▀h│╠╣▄┐ž╠Ä└ĒŽĄĮyĪŻÅ─DSPīŹ¼Fą┼╠¢╠Ä└Ēėŗ╦ŃŻ¼░č╠Ä└Ēėŗ╦ŃĮY╣¹é„▀fĮoų„DSPŻ╗ų„DSPīŹ¼F╣▄┐ž─ŻēKŻ¼═©▀^═Ōć·ąŠŲ¼FPGAĄ─┤«┐┌ģfūh░l╦═Įo¤oŠĆé„▌öįOéõŻ¼═©▀^CDMA─ŻēKė├¤oŠĆŠWĮjĄ─ą╬╩ĮŻ¼░l╦═ĄĮ▒O┐žųąą─▄ø╝■ĪŻ▒O┐žųąą─═©▀^ģfūhī”Ųõ┐╔īŹ¼F▀h│╠╣▄└ĒŻ¼░³└©öĄō■Äņ╬─╝■Ė³ą┬Īó│╠ą“Ė³ą┬║═ĀŅæB─Ż╩Į▐DōQĪŻ
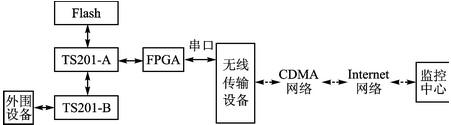
łD1ĪĪŽĄĮyĮYśŗ
2ĪĪ▀h│╠Ė³ą┬įŁ└Ē╝░īŹ¼F
2.1ĪĪįOėŗįŁ└Ē
Flashā╚▓┐Ęų×ķ256éĆblockŻ¼┐╔ęį▓┴īæ╚╬ęŌ╬╗ų├Ą─blockČ╬Ż¼ø]ėą▓┴īæĄ─blocköĄō■▓╗Ģ■üG╩¦ĪŻĖ∙ō■▀@ę╗╠žąįŻ¼░čā╔Ų¼DSP▄ø╝■│╠ą“║═ĘųČ╬Ą─öĄō■ÄņĄ─¤²īæ╬╗ų├Ęųķ_ĪŻFlash┐šķgĄžųĘĘų┼õ╚ńłD2╦∙╩ŠĪŻ
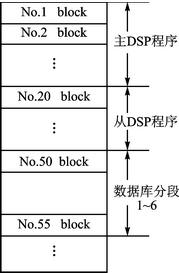
łD2ĪĪFlash┐šķgĄžųĘĘų┼õ╩ŠęŌłD
▒O┐žųąą─░┤ššā╚▓┐ģfūh░čöĄō■Äņ╗“│╠ą“╬─╝■Ęų░³Ż¼═©▀^¤oŠĆŠWĮjŽ┬░lĄĮęįTS201×ķ║╦ą─Ą─ą┼╠¢╠Ä└ĒÖCĪŻ╠Ä└ĒÖCĮė╩š═ĻöĄō■║¾Ż¼═©▀^ūį╔ĒĄ─¤²īæ╣”─▄Ż¼░čą┬öĄō■ūįäėīæ╚ļFlashųąĪŻųžą┬åóäė║¾Ż¼DSPųž▌dīŹ¼F▀h│╠ĘųŲ¼Ė³ą┬│╠ą“Ą─╣”─▄ĪŻ│╠ą“Ą─│§╩╝╗»įOų├ųąŻ¼├┐┤╬Ģ■ūįäėūx╗žFlashųąĄ─öĄō■Ż¼═Ļ│╔Ė³ą┬öĄō■ÄņģóöĄĄ─╣”─▄ĪŻ
×ķ┴╦į÷╝ė▀h│╠Ė³ą┬Ą─┐╔┐┐ąįŻ¼░čā╔Ų¼DSP│╠ą“Ęųķ_╬╗ų├¤²īæĪŻė╔ė┌ų„DSPų╗╔µ╝░╣▄└Ē┐žųŲ╣”─▄Ż¼╦∙ęį░čų„DSP│╠ą“ū„×ķš¹éĆŽĄĮyĄ─“Üż”Ż¼ę╗░Ń▓╗ū„Ė³ą┬ĪŻė├Å─DSPīŹ¼FŲõų„ꬥ─ąį─▄ėŗ╦ŃŻ¼╦³Ą─╝ė▌d═©▀^ų„DSPĄ─Link┐┌ę²ī¦ĪŻ▀@śėŻ¼┤¾▓┐ĘųĄ─į┌ŠĆŠSūo║═╦ŃĘ©│╠ą“╔²╝ē═©▀^Ė³ą┬Å─DSPŠ═─▄═Ļ│╔ĪŻį┌Ė³ą┬Ą─▀^│╠ųąŻ¼ų„DSP│╠ą“▓╗Ģ■╩▄ė░ĒæŻ¼į÷ÅŖ┴╦ŽĄĮyĄ─┐╔┐┐ąįŻ¼ę▓▓╗▒žō·ą─═╗╚╗Ą¶ļŖĢ■ī¦ų┬ŽĄĮy▄ø╝■Ą─▒└ØóĪŻ
2.2ĪĪ╗∙ė┌TS201Ą─▀h│╠Ė³ą┬▀^│╠
▒ŠŽĄĮyųŲČ©ā╚▓┐ģfūhŻ¼īŹ¼F▀h│╠Ė³ą┬Ą─ųĖ┴ŅĮ╗╗źĪŻą┼╠¢╠Ä└ĒÖCĮė╩šųĖ┴ŅŻ¼░┤ššģfūhøQČ©▀h│╠Ė³ą┬Ą─ā╚╚▌Ż¼Ęų×ķ▄ø╝■Ė³ą┬╗“š▀öĄō■ÄņĖ³ą┬ĪŻ╚¶×ķ▄ø╝■Ė³ą┬į┘ģ^Ęųų„ĪóÅ─DSP▄ø╝■Ė³ą┬Ż╗╚¶×ķöĄō■ÄņĖ³ą┬Ż¼Ė∙ō■öĄō■Äņą┼ŽóøQČ©Ė³ą┬Ą─╬╗ų├║═Č╬öĄĪŻ
▒ŠŽĄĮyĄ─öĄō■Äņ╬─╝■×ķ30K×4ūų╣ØŻ¼Ęų×ķ6Č╬ĪŻĖ∙ō■¤oŠĆé„▌öįOéõĄ─░l╦═─▄┴”Ż¼░čöĄō■░┤šš├┐░³198ūų╣ØĘų░³Ż¼├┐░³░³└©ł¾Ņ^Īó┐é░³öĄĪó░³╠¢║═ąŻ“×╬╗Ą╚ą┼ŽóŻ¼öĄō■ģfūhŠ▀¾wĖ±╩Į╚ńŽ┬Ż║

ł¾Ņ^Ż║SOHŻ╗
ł¾╬─ķLČ╚Ż║▒Š░³öĄō■Ą─ķLČ╚Ż¼░³└©ł¾Ņ^Ż¼╣╠Č©×ķ198Ż╗
┐é░³öĄŻ║┤╦┤╬│╠ą“╗“š▀öĄō■Äņ╬─╝■Ęų│╔Ą─┐é░³öĄŻ╗
░³╠¢Ż║▒Š░³Ą─ŠÄ╠¢Ż╗
öĄō■Ż║ąĶę¬Ė³ą┬Ą─öĄō■Ż╗
ąŻ“×╬╗Ż║š╝3éĆūų╣ØŻ¼░³└©1éĆūų╣ØĄ─Ųµ┼╝ąŻ“×╬╗Īó2éĆūų╣ØĄ─CRCąŻ“×╬╗ĪŻ
░l╦═Ė³ą┬╬─╝■ĢrŻ¼ŽĄĮy▓╔ė├╬š╩ųģfūhĪŻą┼╠¢╠Ä└ĒÖC├┐Įė╩šĄĮ1░³öĄō■Ż¼īó░l╗žüą┼ŽóĮo▒O┐žųąą─Ż¼▒O┐žųąą─Įė╩šĄĮ│╔╣”╗žüą┼Žó║¾Ż¼į┘░lŽ┬1░³öĄō■ĪŻĘ±ätīó▀M╚ļĄ╚┤²─Ż╩ĮŻ¼10 s║¾ūįäėųž░l┤╦░³öĄō■ĪŻ╚¶▀B└mųž░l3┤╬╚į╚╗▓╗│╔╣”Ż¼▓┼Ę┼Śē┤╦┤╬Ė³ą┬ĪŻą┼╠¢╠Ä└ĒÖC▄ø╝■ÖCųŲ║═▒O┐žųąą─ę╗śėŻ¼░l╦═╗žü║¾▀M╚ļĄ╚┤²─Ż╩ĮŻ¼10 s║¾ūįäėųžą┬░l╦═╗žüą┼ŽóŻ¼ūŅČÓųž░l3┤╬Ż¼▓┼Ę┼ŚēĖ³ą┬Ż¼ųžą┬╗žĄĮ╣żū„ĀŅæBŻ¼ų▒ĄĮĮė╩šĄĮą┬Ą─Ž┬░lųĖ┴ŅĪŻ
ą┼╠¢╠Ä└ĒÖCĮė╩š═Ļ╚½▓┐Ą─öĄō■░³║¾Ż¼▀Ćę¬▀Mąą░³╠¢║╦ī”Ż¼┤_šJ¤oš`║¾Ż¼ė├ģfūh═©ų¬▒O┐žųąą─╝┤īó▀M╚ļ¤²īæ─Ż╩ĮĪŻ░┤ššFlash╠žČ©Ą─ūxīæųĖ┴ŅŻ¼░čRAMųąĄ─öĄō■ė╔FlashĄ─Ą┌20éĆblockŲ╩╝╬╗ų├ķ_╩╝īæ╚ļĪŻ╚ń╣¹╩ŪöĄō■ÄņŻ¼░┤ššģfūhĮŌūxöĄō■Č╬╠¢Ż¼░č¤²īæŲ╩╝╬╗ų├Ė─×ķŽÓæ¬blockĄ─ĄžųĘĪŻ¤²īæ═Ļ│╔║¾Ż¼īó¤²īæ│╔╣”┼cʱĄ─ą┼Žó╗žüĮo▒O┐žųąą─ĪŻį┌▓╗öÓļŖĄ─ŪķørŽ┬Ż¼ŽĄĮy┤╦Ģr╚į╚╗╩Ū░┤šš┼fĄ─▄ø╝■░µ▒Š▀\ąąĪŻŽĄĮyįOėŗ┴╦▀h│╠Ą─ė▓ųžåóŻ¼═©▀^ųĖ┴Ņ┐žųŲ└^ļŖŲ„ĪŻ└^ļŖŲ„▀BĮėļŖį┤─ŻēKŻ¼īŹ¼FČ╠Ģ║Ą─öÓļŖ╣”─▄Ż¼Å─Č°īŹ¼FDSPĄ─ųžą┬╝ė▌dŻ¼═Ļ│╔│╠ą“╗“š▀öĄō■ÄņĖ³ą┬ĪŻįö╝ÜĄ─▀h│╠Ė³ą┬┴„│╠╚ńłD3╦∙╩ŠĪŻ
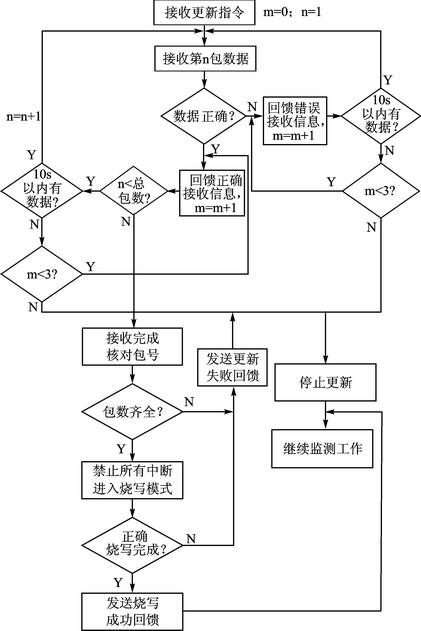
łD3ĪĪ▀h│╠Ė³ą┬┴„│╠
2.2.1ĪĪFPGA│╠ą“īŹ¼F
FPGAžōž¤Ų¼▀x┤«┐┌ą┼╠¢Ż¼TS201×ķĖ▀╦┘įOéõĪŻ×ķ┴╦▓╗ŅlĘ▒┤“öÓTS201Ą─▀M│╠Ż¼į┌FPGAųąįOėŗ9éĆūų╣ØĄ─FIFOĪŻFIFOØM╝┤Ž“TS201░l╦═IRQ═Ō▓┐ųąöÓą┼╠¢Ż¼═©ų¬TS201ūx╚ĪöĄō■Ż¼FPGAĮė╩š1éĆūxą┼╠¢ŪÕ┐šFIFOųąĄ─1éĆöĄō■ĪŻ
2.2.2ĪĪTS201ųąöÓ│╠ą“īŹ¼F
┤«┐┌▓╔ė├ųąöÓĄ─ĘĮ╩ĮĮė╩šŻ¼Š▀¾wĄ─ISR▓┐ĘųīŹ¼F╚ńŽ┬Ż║
interrupt(SIGIRQ1, isr_uart2);//įOų├┤«┐┌ųąöÓĄžųĘ
interrupt(SIGTIMER1LP,TIMER1_ISR); //įOų├Č©ĢrŲ„ųąöÓĄžųĘ
void isr_uart2() {
int i;
int buf_uart[9]Ż╗
for(i=0;i<9;i++){
buf_uart[i]=*UART_ADD_2;//ūx╚ĪöĄō■ŠĆ╔ŽĄ─öĄō■
buf_uart[i] =buf_uart[i] & 0xff; //▒▄├ŌöĄō■ŠĆ┤«ö_Ż¼ų╗╚ĪöĄō■ŠĆ╔ŽĄ─Ą═8╬╗
}
……
}
ó┌ Č©ĢrŲ„│╠ą“įOėŗĪŻTS201ėąTimer0║═Timer1ā╔éĆČ©ĢrŲ„Ż¼├┐éĆČ©ĢrŲ„ėųĘų×ķĖ▀╬╗║═Ą═╬╗ā╔éĆ╝─┤µŲ„ĪŻ▒ŠŽĄĮy▓╔ė├Timer1Ą─Ą═╬╗╝─┤µŲ„ū÷10 sČ©ĢrĪŻ
void TIMER1_ISR( ){
int i,tempp;//ĻPķ]Č©ĢrŲ„
tempp=__builtin_sysreg_read(__INTCTL);
tempp=tempp & (0xFFFFFFFF ^INTCTL_TMR1RN);
__builtin_sysreg_write(__INTCTL, tempp);
NumberTimer++;
if(NumberTimer==3) { //╚ń╣¹ęčĮøųž░l3┤╬
Variable_Init( );//│§╩╝╗»ūā┴┐
}
else{
SendCopyData( ); //ųž░lų«Ū░Ą─ą┼Žó
__builtin_sysreg_write(__TMRIN1H, 0x0); //Ė▀╬╗Ą─│§╩╝╗»╩Ū▒žąĶĄ─
__builtin_sysreg_write(__TMRIN1L, CK10); //┼õų├Timer1Ą═╬╗╝─┤µŲ„Ż¼▓óČ©Ģr10 sųžą┬ķ_åóČ©ĢrŲ„
tempp=__builtin_sysreg_read(__INTCTL);
tempp=tempp | INTCTL_TMR1RN;
__builtin_sysreg_write(__INTCTL, tempp);
}
}
ŲõųąŻ¼Č©ĢrŲ„Ą─ėŗöĄų▄Ų┌╩ŪCCLK/2Ż¼╦∙ęįŻ¼CK10=CCLK/2×10Ż╗
2.2.3ĪĪFlash│╠ą“īŹ¼F
TS201ī”ė┌═Ō▓┐įOéõFlashĄ─ūxīæ▓┘ū„ų╗─▄═©▀^DMA▀MąąŻ¼▒ŠŽĄĮyįOėŗ▓╔ė├DMA0ĪŻŲõ║╦ą─┤·┤a╚ńŽ┬Ż║
void dma0_ISR( ){
return;
}
void WriteFlash( int Offset, int nValue ){//Ž“FlashĄ─Offset╬╗ų├īæöĄnValue
int temp=nValue;
TCB_temp.DI=&temp;
TCB_temp.DX=0x00010001;
TCB_temp.DY=0;
TCB_temp.DP=0x43000000;
q=__builtin_compose_128((long long)TCB_temp.DI | (long long)TCB_temp.DX®é®é32, (long long)(TCB_temp.DY | (long long)TCB_temp.DP®é®é32));
__builtin_sysreg_write4(__DCS0, q);
TCB_temp.DI=(int*)(Offset);
TCB_temp.DX=0x00010001;
TCB_temp.DY=0;
TCB_temp.DP=0xc3000000;
q=__builtin_compose_128((long long)TCB_temp.DI | (long long)TCB_temp.DX®é®é32, (long long)(TCB_temp.DY | (long long)TCB_temp.DP®é®é32));
__builtin_sysreg_write4(__DCD0, q);
asm("nop;;");
asm("nop;;");
}
int ReadFlash( int Offset){ //Å─FlashĄ─Offset╬╗ų├ūx╚ĪöĄō■temp▓óĘĄ╗ž
int temp;
TCB_temp.DI=(int*)(Offset);
TCB_temp.DX=0x00010001;
TCB_temp.DY=0;
TCB_temp.DP=0xc3000000;
q=__builtin_compose_128((long long)TCB_temp.DI | (long long)TCB_temp.DX®é®é32, (long long)(TCB_temp.DY | (long long)TCB_temp.DP®é®é32));
__builtin_sysreg_write4(__DCS0, q);
TCB_temp.DI=&temp;
TCB_temp.DX=0x00010001;
TCB_temp.DY=0;
TCB_temp.DP=0x43000000;
q=__builtin_compose_128((long long)TCB_temp.DI | (long long)TCB_temp.DX®é®é32, (long long)(TCB_temp.DY | (long long)TCB_temp.DP®é®é32));
__builtin_sysreg_write4(__DCD0, q);
asm("nop;;");
asm("nop;;");
return temp;
}
2.3ĪĪ┐╔┐┐ąįįOėŗ
ų„DSP╩Ū▓╔ė├Eprom╝ė▌dŻ¼▒žĒÜÅ─FlashĄ─0x00ĄžųĘķ_╩╝Ż╗Å─DSPĄ─│╠ą“╬╗ų├Ę┼į┌FlashĄ─Ą┌20éĆblockČ╬Ż╗öĄō■Äņą┼Žó╬╗ų├Ę┼į┌Ą┌50éĆblockČ╬ĪŻ×ķ┴╦į÷╝ė▀h│╠Ė³ą┬Ą─┐╔┐┐ąįŻ¼▓╔ė├┴╦ęįŽ┬ĘĮĘ©Ż║
ó┘ ░č┤¾┴┐Ą─öĄō■Ęų░³Ż¼├┐1ąĪ░³╠Ē╝ėł¾Ņ^║═ąŻ“×╬╗ĪŻą┼╠¢╠Ä└ĒÖC║═▒O┐žųąą─▓╔ė├╬š╩ųĄ─ĘĮ╩ĮŻ¼ą┼╠¢╠Ä└ĒÖC├┐Įė╩šĄĮ1ąĪ░³Ą─öĄō■╝┤▀MąąąŻ“ׯ¼▓ó╗žüą┼ŽóĮo▒O┐žųąą─Ż¼▒O┐žųąą─Ė∙ō■Įė╩šĄ─ą┼Žó┼ąöÓ╩Ū└^└m░l╦═Ž┬1░³▀Ć╩Ūųž░l▒Š░³ĪŻ
ó┌ Ųµ┼╝ąŻ“×║═CRCąŻ“׎ÓĮY║ŽĪŻå╬ę╗Ą─Ųµ┼╝ąŻ“×│÷ÕeĄ─Ė┼┬╩▀Ć╩Ū║▄Ė▀Ą─Ż¼▒ŠŽĄĮyį┌Ųµ┼╝ąŻ“ץ─╗∙ĄA╔ŽŻ¼ėų╝ė╔Ž┴╦CRCąŻ“ׯ¼į÷ÅŖöĄō■Ą─┐╔┐┐ąįĪŻ
ó█ ŠWĮjČ┬╚¹ĪóöÓķ_╗“š▀┤«┐┌Ą─š`┤aČ╝Ģ■įņ│╔öĄō■Õeš`Ż¼Č°įņ│╔Ė³ą┬▓╗│╔╣”Ż¼×ķ┴╦╣Ø╩Ī┘Yį┤║═į÷╝ėĖ³ą┬Ą─│╔╣”┬╩Ż¼įOėŗ▄ø╝■ų¦│ųöÓ³c└mé„ĪŻą┼╠¢╠Ä└ĒÖC▄ø╝■į┌Įė╩šöĄō■░³Ą─▀^│╠ųąŻ¼╚ń╣¹ė÷ĄĮ═╗░lŪķørŻ¼ų╗ę¬į┌▓╗öÓļŖĄ─ŪķørŽ┬Ż¼▄ø╝■īóūįäė▒Ż┤µ╦∙ėąęčĮøĮė╩š═Ļ│╔Ą─öĄō■░³Ż¼«öųžą┬Įė╩š▀h│╠Ė³ą┬├³┴ŅĢrŻ¼═©▀^ģfūhę¬Ū¾ųąą─▄ø╝■░l╦═Ą─öĄō■░³╠¢Ż¼īŹ¼FöÓ³c└mé„ĪŻ«ö╚╗Ż¼ģfūhųąųŲČ©┴╦▒O┐žųąą─┐╔ęį═Żų╣▀h│╠Ė³ą┬Ż¼ę¬Ū¾ą┼╠¢╠Ä└ĒÖCųžą┬ķ_╩╝ą┬ę╗┤╬Ą─▀h│╠Ė³ą┬ĪŻ
ó▄ öĄō■ÄņĘųČ╬Ż¼ūīĖ³ą┬ĢröĄō■Äņ╬─╝■┤¾ąĪ┐╔š{š¹Ż¼├┐┤╬ų╗Ė³ą┬ąĶꬥ─▓┐ĘųŻ¼▒M┴┐╣Ø╩Ī┘Yį┤ĪŻ╚½▓┐Ą─öĄō■Äņą┼Žó▒╚▌^┤¾Ż¼═∙═∙ų╗ąĶę¬Ė³ą┬ŲõųąĄ─▓┐Ęų╗“š▀ąĪ▓┐ĘųŻ¼╦∙ęįĖ∙ō■ā╚╚▌║═Įø“ׯ¼▒ŠŽĄĮy░čöĄō■ÄņĘų×ķ┴╦6Č╬Ż¼Ęųäe░č6Č╬öĄō■╬─╝■Ę┼į┌FlashĄ─6éĆblockųąŻ¼▀@śė▀h│╠Ė³ą┬Š═Ė³Š▀ņ`╗ŅąįŻ¼▀h│╠é„╦═Ą─öĄō■┴┐ę▓Ą├ĄĮ┴╦┐žųŲŻ¼į÷ÅŖ┴╦▀h│╠Ė³ą┬│╔╣”Ą─┐╔┐┐ąįĪŻ
ó▌ Å─DSPė├Link┐┌╝ė▌dŻ¼┐╔ęįīŹ¼F┐╔┐┐Ą─ČÓ┤╬Ė³ą┬ĪŻ╝┤╩╣Ė³ą┬▀^│╠ųąė÷ĄĮ═╗░lŪķørī¦ų┬Ė³ą┬▓╗│╔╣”Ż¼ų„DSP╚į╚╗╣żū„š²│ŻŻ¼┐╔ęįį┘┤╬Įė╩šĖ³ą┬ųĖ┴ŅŻ¼ųžą┬Ė³ą┬Å─DSPŻ¼ų▒ų┴Ė³ą┬│╔╣”ĪŻ
2.4ĪĪ£yįć║═ĮY╣¹
▒ŠŽĄĮyįOėŗĄ─▀h│╠Ė³ą┬░³└©ā╔éĆŅÉą═Ż║öĄō■Äņ║═│╠ą“ĪŻĖ³ą┬╬─╝■┤¾ąĪŠ∙┐╔Ė─ūāĪŻī”ė┌öĄō■Äņ╬─╝■£yįćŻ¼Å─1░³ĄĮ800░³Š∙▀Mąą┴╦┤¾┴┐Ą─£yįćĪŻĮY╣¹’@╩ŠŻ¼į┌ŠWĮjš²│ŻĄ─ŪķørŽ┬Ż¼╗∙▒ŠŠ∙─▄Ė³ą┬│╔╣”Ż╗į┌ŠWĮjĘ▒├”Ą─ĢrČ╬Ż¼500░³ęįŽ┬Ą─öĄō■╬─╝■Ż¼Ė³ą┬│╔╣”┬╩┤¾ė┌95%Ż¼500░³ęį╔ŽĄ─Ė³ą┬│╔╣”┬╩ę▓┤¾ė┌90%ĪŻ£yįćĮY╣¹’@╩Š┤╦▀h│╠Ė³ą┬Ą─įOėŗ─▄ØMūŃīŹļHæ¬ė├Ą─ąĶŪ¾ĪŻ
ĮYšō
▒Š╬─įö╝ÜĄž├Ķ╩÷┴╦▀h│╠Ė³ą┬ŪČ╚ļ╩Į▄ø╝■║═öĄō■ÄņĄ─ĘĮĘ©Ż¼╠ß│÷┴╦│╠ą“ĘųŲ¼Ė³ą┬ĪóöĄō■Äņ▓┐ĘųĖ³ą┬Ą─ą┬ĘĮĘ©ĪŻėąę╗³cąĶę¬ūóęŌŻ¼į┌ų„Ų¼│╠ą“Ė³ą┬▀^│╠ųąŻ¼▀Ć╩Ūėą▓╗─▄öÓļŖĄ─ę¬Ū¾ĪŻ╦∙ęįįOėŗĢrŻ¼░čąĶę¬į┌ŠĆŠSūo║═│╠ą“╔²╝ēĄ─▄ø╝■▓┐ĘųĘ┼į┌Å─DSPŻ¼į┌īŹļHæ¬ė├ųąų„ę¬▀MąąÅ─DSPĄ─Ė³ą┬ĪŻ▀@śėŻ¼š¹éĆŪČ╚ļ╩ĮŽĄĮyĄ─▀h│╠Ė³ą┬╣”─▄Ą─┐╔┐┐ąįĄ├ĄĮ┴╦║▄┤¾Ą─╠ßĖ▀ĪŻ
┤╦æ¬ė├įOėŗęčĮø│╔╣”æ¬ė├į┌─│ą═╠¢čąųŲĄ─įOėŗųąŻ¼į┌īŹļHĄ─£yįć║═æ¬ė├įć“×ųąŻ¼▀h│╠Ą─öĄō■ÄņĖ³ą┬║═│╠ą“Ė³ą┬│╔╣”┬╩Š∙▀_ĄĮ90%ęį╔ŽŻ¼═Ļ╚½ØMūŃæ¬ė├ąĶŪ¾ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║TS201Ą─ŪČ╚ļ╩ĮŽĄĮy▄ø╝■▀h│╠Ė³ą┬ĘĮĘ©
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/solutions/1401937862.html