



0 ę²čį
ļSų°╣żśI╝╝ągĄ─▀M▓Įęį╝░ĮøØ·Ą─░lš╣Ż¼į┌Ž¹┘Mš▀Ė▀┘|┴┐Ą─ę¬Ū¾Ž┬Ż¼╣”─▄╔ŽĄ─ąĶŪ¾╝║▓╗į┘╩Ū┌AĄ├╩ął÷Ą─╬©ę╗Śl╝■ĪŻ«aŲĘ▓╗āHę¬ėąŽ╚▀MĄ─╣”─▄Ż¼▀Ćę¬ėą┴„Ģ│Īóįņą═Ė╗ėąéĆąįĄ─«aŲĘ═Ōė^Ż¼ęį╬³ę²Ž¹┘Mš▀Ą─ūóęŌĪŻ×ķ▀m欼F┤·Ž╚▀MųŲįņĄ─░lš╣Ż¼ąĶę¬īóīŹ╬’śė╝■╗“╩ų╣ż─Żą═▐D╗»×ķCADöĄō■Ż¼ęį▒Ń└¹ė├┐ņ╦┘│╔ą═ŽĄĮy(Rapid PrototypingŻ¼RP)Ż¼ėŗ╦ŃÖC▌oų·ųŲįņŽĄĮy(Computer Aided ManufactureŻ¼CAM)Ż¼«aŲĘöĄō■╣▄└Ē(Product Dada ManagementŻ¼PDM)Ą╚Ž╚▀MŽĄĮyī”Ųõ▀Mąą╠Ä└Ē║═╣▄└ĒŻ¼▓ó▀Mę╗▓Į▀Mąąą▐Ė─║═į┘įOėŗĪŻ▀@Ģr║“Š═ąĶę¬ę╗éĆę╗¾w╗»Ą─ĮŌøQĘĮ░ĖŻ║śėŲĘ→öĄō■→śėŲĘĪŻ─µŽ“╣ż│╠īŻķT×ķųŲįņśI╠ß╣®┴╦ę╗éĆ╚½ą┬Ė▀ą¦Ą─ųžśŗ╩ųČ╬Ż¼īŹ¼FÅ─īŹļH╬’¾wĄĮÄū║╬─Żą═Ą─ų▒Įė▐DōQĪŻ¼F╚ńĮ±Ż¼└¹ė├CAD/CAM╝╝ągĪóŽ╚▀MųŲįņ╝╝ągüĒīŹ¼F«aŲĘīŹ╬’Ą──µŽ“╣ż│╠Ż¼ęčĮø│╔×ķCAD/CAMŅIė“Ą─ę╗éĆ蹊┐¤ß³cŻ¼▓ó│╔×ķ─µŽ“╣ż│╠╝╝ągæ¬ė├Ą─ų„ę¬ā╚╚▌ĪŻ
1 ─µŽ“╣ż│╠Ą─╣żū„┴„│╠
─µŽ“╣ż│╠(Reverse EngineeringŻ¼RE)ę▓ĘQĘ┤Ū¾╣ż│╠ĪóĘ┤Ž“╣ż│╠Ą╚Ż¼╦³╩ŪīóīŹ╬’▐Dūā×ķCAD─Żą═ŽÓĻPĄ─öĄūų╗»╝╝ągĪóÄū║╬─Żą═ųžĮ©╝╝ąg║═«aŲĘųŲįņ╝╝ągĄ─┐éĘQŻ¼╩Ūīóęčėą«aŲĘ╗“īŹ╬’─Żą═▐DōQ│╔╣ż│╠įOėŗ─Żą═║═Ė┼─Ņ─Żą═Ż¼▓óį┌┤╦╗∙ĄA╔Žī”ęčėąĄ─«aŲĘ▀MąąĮŌŲ╩Īó╔Ņ╗»Īóį┘äōįņĄ─▀^│╠ĪŻ╦³Ųį┤ė┌Š½├▄£y┴┐║═┘|┴┐Öz“ׯ¼╩ŪįOėŗŽ┬ė╬Ž“įOėŗ╔Žė╬Ę┤üą┼ŽóĄ─╗ž┬ĘĪŻ
─µŽ“╣ż│╠Ą─ę╗░Ń┴„│╠╩ūŽ╚╩Ū═©▀^£y┴┐Æ▀├Ķęį╝░Ė„ĘNŽ╚▀MĄ─öĄō■╠Ä└Ē╩ųČ╬½@Ą├«aŲĘīŹ╬’ą┼ŽóŻ¼░čīŹ╬’śė╝■▐DōQ×ķCAD─Żą═Ż¼╚╗║¾└¹ė├ėŗ╦ŃÖC▌oų·ųŲįņĪó┐ņ╦┘─Żą═ųŲįņĪó┐ņ╦┘─ŻŠ▀║═PDMŽĄĮyĄ╚Ž╚▀M╝╝ągī”Ųõ▀Mąą╠Ä└ĒĄ─ę╗éĆŽĄĮy▀^│╠Ż¼ęŖłD1ĪŻ

łD1 ─µŽ“╣ż│╠╣żū„┴„│╠
2 öĄō■▓╔╝»
į┌▒Ē├µöĄūų╗»╝╝ągųąŻ¼Ė∙ō■£yįćĘĮĘ©Ą─▓╗═¼Ż¼┐╔ęįīóöĄō■▓╔╝»ĘĮĘ©Ęų×ķĮėė|╩Į£y┴┐║═ĘŪĮėė|╩Į£y┴┐ā╔┤¾ŅÉĪŻĮėė|╩Į£y┴┐ę╗░Ń╩Ū└¹ė├Ė„ĘN╠ĮŅ^▀MąąöĄō■£y┴┐ĪŻĘŪĮėė|╩Į£y┴┐ų„ę¬╩Ū╗∙ė┌╣ŌīWĪó┬ĢīWĪó┤┼īWĄ╚ŅIė“ųąĄ─╗∙▒ŠįŁ└ĒŻ¼īóę╗Č©Ą─╬’└Ē─ŻöM┴┐═©▀^▀m«öĄ─╦ŃĘ©▐D╗»×ķśė╝■▒Ē├µĄ─ū°ś╦³cĪŻ
2.1 ╚²ū°ś╦£y┴┐
▀@└’ų„ę¬ĮķĮBĮėė|╩Į£y┴┐ųąĄ─╚²ū°ś╦£y┴┐ÖCĪŻū„×ķę╗ĘN£y┴┐āxŲ„Ż¼╚²ū°ś╦£y┴┐ÖCų„ę¬╩Ū▒╚▌^▒╗£y┴┐┼cś╦£╩┴┐Ż¼▓óīó▒╚▌^ĮY╣¹ė├öĄųĄ▒Ē╩Š│÷üĒĪŻ×ķ┴╦Ęų╬÷╣ż╝■╝ė╣żöĄō■Ż¼╗“×ķ─µŽ“╣ż│╠╠ß╣®╣ż╝■įŁ╩╝ą┼ŽóŻ¼Įø│ŻąĶę¬ė├╚²ū°ś╦£y┴┐ÖCī”▒╗£y╣ż╝■▒Ē├µ▀MąąöĄō■³cÆ▀├ĶĪŻ╚²ū°ś╦£y┴┐ÖCĄ─Æ▀├Ķ▓┘ū„╩Ūæ¬ė├DMIS│╠ą“į┌▒╗£y╬’¾w▒Ē├µĄ─╠žČ©ģ^ė“ā╚▀MąąöĄō■³c▓╔╝»Ż¼įōģ^ė“┐╔ęį╩Ūę╗ŚlŠĆĪóę╗éĆ├µŲ¼Īó┴Ń╝■Ą─ę╗éĆĮž├µĪó┴Ń╝■Ą─Ū·ŠĆ╗“ŠÓ▀ģŠēę╗Č©ŠÓļxĄ─ų▄ŠĆĄ╚ĪŻīó▒╗£y╬’¾wų├ė┌╚²ū°ś╦£y┴┐┐šķgŻ¼┐╔½@Ą├▒╗£y╬’¾w╔ŽĖ„£y³cĄ─ū°ś╦╬╗ų├Ż¼Ė∙ō■▀@ą®³cĄ─┐šķgū°ś╦ųĄŻ¼Įøėŗ╦ŃŪ¾│÷▒╗£y╬’¾wĄ─Äū║╬│▀┤ńĪóą╬ĀŅ║═╬╗ų├ĪŻŲõ╣żū„Ą─╗∙▒ŠįŁ└ĒŠ═╩Ū═©▀^╠Į£yé„ĖąŲ„Ż©╠ĮŅ^Ż®┼c£y┴┐┐šķg▌SŠĆ▀\äėĄ─┼õ║ŽŻ¼ī”▒╗£yÄū║╬į¬╦ž▀Mąąļx╔óĄ─┐šķg³c╬╗ų├Ą─½@╚ĪŻ¼╚╗║¾═©▀^ę╗Č©Ą─öĄīWėŗ╦ŃŻ¼═Ļ│╔ī”╦∙£yĄ├³cŻ©³c╚║Ż®Ą─Ęų╬÷öM║ŽŻ¼ūŅĮK▀ĆįŁ│÷▒╗£yĄ─Äū║╬į¬╦žŻ¼▓óį┌┤╦╗∙ĄA╔Žėŗ╦ŃŲõ┼c└ĒšōųĄŻ©├¹┴xųĄŻ®ų«ķgĄ─Ų½▓ŅŻ¼Å─Č°═Ļ│╔ī”▒╗£y┴Ń╝■Ą─Öz“×╣żū„ĪŻłD2╩Ūė├╚²ū°ś╦£y┴┐āxī”ę╗░▓╚½├▒▀MąąÆ▀├ĶĄ├ĄĮĄ─³cįŲöĄō■ĪŻ
łD2 ░▓╚½├▒Ą─³cįŲöĄō■
2.2 Ū·├µųžśŗ
į┌─µŽ“╣ż│╠ųąŻ¼ė╔£y┴┐³cįŲųžśŗīŹ╬’Ą─╚²ŠSCAD─Żą═╩Ūš¹éĆ─µŽ“▀^│╠ųąūŅĻPµIĪóūŅÅ═ļsĄ─ę╗ŁhŻ¼ę“×ķ║¾└mĄ─«aŲĘ╝ė╣żųŲįņĪó┐ņ╦┘│╔ą═ĪóöĄō■╠Ä└Ē║¾Ą─³cįŲųŲįņĪó╠ōöMųŲįņĪóĘ┬šµĪó╣ż│╠Ęų╬÷║═«aŲĘĄ─į┘įOėŗĄ╚æ¬ė├Č╝ąĶę¬CAD─Żą═Ą─ų¦│ųĪŻŪ·├µųžśŗ╩Ū└¹ė├«aŲĘ▒Ē├µĄ─╔óüy³cöĄō■Ż¼═©▀^▓ÕųĄ╗“š▀öM║ŽśŗĮ©ę╗éĆĮ³╦Ų─Żą═üĒ▒ŲĮ³«aŲĘįŁą═ĪŻĖ∙ō■═žōõą╬╩ĮĄ─▓╗═¼Ż¼─┐Ū░─µŽ“╣ż│╠蹊┐ųąŻ¼ūįė╔Ū·├µĮ©─Ż╩ųČ╬Ęų×ķęį╚²ĮŪBezierŪ·├µ×ķ╗∙ĄAĄ─Ū·├µśŗĮ©ĘĮĘ©║═ęįNURBSŻ©ĘŪŠ∙ä“ėą└ĒBśėŚlŻ®Ū·├µ×ķ╗∙ĄAĄ─Šžą╬ė“ģóöĄŪ·├µöM║ŽĘĮĘ©ĪŻį┌öĄō■ĘųĖŅĄ─╗∙ĄA╔ŽŻ¼╩ūŽ╚▒µ├„▓╗═¼Ą─³cįŲöĄō■ŅÉą═Ż¼╚╗║¾Ė∙ō■▓╗═¼ŅÉą═Ą─³cįŲ─Żą═Ż¼▀xō±▓╗═¼Ą─Ū·├µśŗĮ©ĘĮĘ©ĪŻ
3 Imagewareī”³cįŲöĄō■Ą─╠Ä└Ē
Imageware╩Ū─┐Ū░▀\ė├ūŅ×ķÅVĘ║Ą──µŽ“╣ż│╠▄ø╝■Ż¼Š▀ėąÅŖ┤¾Ą─³c╠Ä└Ē╣”─▄Ż¼Š▀ėąÅŖ┤¾Ą─£y┴┐öĄō■╠Ä└ĒĪóŪ·├µįņą═║═š`▓ŅÖz£yĄ─╣”─▄ĪŻ┐╔ęį╠Ä└ĒÄū╚fų┴Äū░┘╚fĄ─³cįŲöĄō■ĪŻš²▒╗ÅVĘ║æ¬ė├ė┌Ų¹▄ćĪó║Į┐šĪó║Į╠ņĪóŽ¹┘M╝ęļŖĪó─ŻŠ▀Īóėŗ╦ŃÖC┴Ń▓┐╝■Ą╚įOėŗ┼cųŲįņŅIė“ĪŻ
Ž┬├µ╬ęéāė├Imagewareī”╔Ž╩÷Ą─░▓╚½├▒Ą─³cįŲöĄō■▀MąąöM║ŽĪŻ
3.1 ³cįŲöĄō■Ą─ŅA╠Ä└Ē
(1)Imageware┐╔ęį░čīŹ¾wį┌╚²ū°ś╦£y┴┐āxųąÆ▀├Ķ│÷Ą─┤¾┴┐Ą─³cįŲūx╚ļŻ¼▓ķ┐┤³cįŲĄ─ą┼ŽóŻ¼ė^▓ņ³cįŲöĄō■Ą─┤¾ų┬Ą─ą╬ĀŅĪŻ
(2)ī”³cįŲ▀Mąąī”²R┼cČ©╬╗Ż¼ė╔ė┌Æ▀├Ķ╬’¾wĢrŻ¼ėąą®╬’¾wę¬Å─▓╗═¼Ą─ĮŪČ╚Æ▀├ĶÄū┤╬▓┼─▄═Ļ│╔Ż¼ČÓ┤╬Æ▀├Ķ╦∙ī”æ¬Ą─Šų▓┐ū°ś╦ŽĄ╩Ū▓╗ę╗ų┬Ą─Ż¼ąĶę¬░č▓╗═¼Æ▀├Ķū°ś╦ŽĄĄ─³c║Ž▓óŲüĒŻ¼īó├┐┤╬Æ▀├ĶĄ─Šų▓┐ū°ś╦ŽĄĮyę╗ĄĮ═¼ę╗ū°ś╦ŽĄŻ¼▓óŽ¹│²Äū┤╬Æ▀├Ķ▀^│╠ųąĄ─ųž»B▓┐ĘųŻ¼ūīī”Ž¾─▄ē“═Ļ╚½Ą─ąŻ£╩║═Č©╬╗Ż¼Ą├ĄĮīŹ╬’▒Ē├µ▌^×ķ═Ļš¹Ą─³cįŲĪŻ
(3)╚ź│²įļ┬Ģ³cŻ¼įļ┬Ģ³c╩Ūė╔ė┌£y┴┐ĢröĄō■š`▓Ņę²╚ļĄ─³cŻ¼ų„ę¬┤µį┌ė┌─Żą═╝ŌõJĄ─▀ģ╔Ž║═▀ģĮńĖĮĮ³ĪŻįļ┬Ģ³cė░Ēæų°─Żą═ųžĮ©Ą─£╩┤_ąįŻ¼ĒÜī”įļ┬Ģ³cėĶęį╚ź│²ĪŻ
3.2 ³cįŲĘųēK
×ķ┴╦╩╣─µŽ“įOėŗ▀MąąĄ─Ė³╝ėŠ½┤_║═║åå╬ĪŻ╬ęéā═©│Żę¬ī”Å═ļsĄ─³cįŲöĄō■▀MąąĘųēKĪŻī”³cįŲöĄō■▀Mąą║Ž└ĒĄ─ĘųēKŻ¼▓╗āH┐╔ęį╣Ø╩Ī─µŽ“įOėŗ╦∙╩╣ė├Ą─ĢrķgŻ¼Č°Ūę┐╔ęį£pąĪ³cįŲ┼cöM║ŽŪ·├µų«ķgĄ─š`▓ŅĪŻĖ∙ō■░▓╚½├▒Ą─³cįŲ╠žš„Ż¼═©▀^Ū·┬╩Ęų╬÷Ż¼╬ęéā┐╔ęįĖ∙ō■Ū·┬╩Ą─▓╗═¼Ż¼īó░▓╚½├▒Ą─³cįŲöĄō■Ęų│╔2éĆ³cįŲēKŻ¼╝┤├▒╔ĒĪó├▒ķ▄2éĆ▓┐ĘųŻ©╚ńłD3Ż®ĪŻ├▒╔Ē║═├▒ķ▄ų«ķg┐š╚▒Ą─³cįŲŻ¼į┌öM║ŽŪ·├µĢrŻ¼╬ęéāīó═©▀^Ą╣łAĮŪ╣”─▄üĒ╔·│╔ĪŻ
łD3 ³cįŲöĄō■Ą─ĘųēK
3.3 öM║ŽŪ·├µ
Imageware▄ø╝■ų„ę¬▓╔ė├³c-├µ║═³c-ŠĆ-├µā╔ĘNĘĮĘ©Ż¼ī”Č■┤╬Ū·├µĪó▀^Č╔Ū·├µ║═ūįė╔Ū·├µ▀MąąöM║ŽĪŻ
(1)³c-├µöM║ŽĘĮĘ©
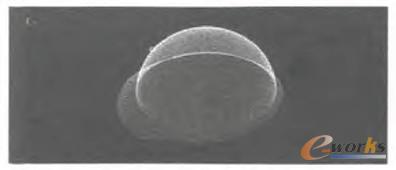
«ö╦∙▓╔╝»Ą─³cįŲöĄō■ĀŅør×ķŠ∙ä“Ą─Ū·├µ╗“š▀«ö³cįŲöĄō■┌ģĮ³│╔ŲĮ├µĪółAų∙ĪółAŪ“ĪółAÕFĄ╚Äū║╬ą╬ĀŅĢrŻ¼┐╔ęį╩╣ė├“Construct-Surface from Cloud-Uniform surface”ųĖ┴Ņų▒Įė╔·│╔ę╗éĆŠ∙ä“Ą─Ū·├µĪŻ├▒ķ▄▓┐ĘųĄ─³cįŲŠ═╩Ūė├▀@ĘNĘĮ╩Įų▒ĮėöM║Ž│╔Ū·├µĄ─Ż©╚ńłD4Ż®ĪŻ

łD4 ├▒ķ▄³cįŲ╝░öM║Ž│╔Ą─Ū·├µ
(2)³c-ŠĆ-├µöM║ŽĘĮĘ©
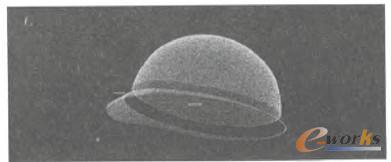
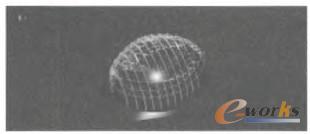
▀@ĘNĘĮĘ©į┌═Ļ│╔Ū·├µųžśŗĢrĮø│Żė├ĄĮĄ─ę╗ĘNĘĮĘ©ĪŻ▓ó▓╗╩Ū╦∙ėąĄ─³cįŲöĄō■Č╝╩ŪŠ∙ä“ŲĮ╗¼Ęų▓╝Ą─Ż¼ėąą®Ģr║“³cįŲöĄō■Ą─Ū·┬╩ūā╗»▌^┤¾Ż¼ų▒ĮėöM║Ž│╔Ū·├µĢ■│÷¼F▌^┤¾Ų½▓ŅŻ¼▓╗─▄Ą├ĄĮ╬ęéāŲ┌═¹Ą─Ū·├µĪŻį┌▀@ĘNŪķørŽ┬╬ęéā┐╔ęįŽ╚Ė∙ō■³cįŲ╠žš„īó³cįŲöĄō■Ą─▌å└¬ŠĆöM║Ž│÷üĒŻ¼╚╗║¾į┘═©▀^▌å└¬ŠĆöM║Ž│╔Ū·├µĪŻ▒Š└²ųąŻ¼Ė∙ō■├▒╔Ē³cįŲĄ─╠žš„Ż¼╬ęéāīó░▓╚½├▒³cįŲĄ─▌å└¬ŠĆ╠ß╚Ī│÷üĒŻ©╚ńłD5Ż®Ż¼╚╗║¾Ė∙ō■▌å└¬ŠĆį┌▀Mąą├▒╔ĒŪ·├µĄ─öM║Ž┼c├▒ķ▄Ū·├µĄ─ą▐╝¶ĪŻłD6╩ŪöM║Ž═Ļ│╔║¾╔ą╬┤ą▐╝¶Ą─Ū·├µĪŻ
łD5 ░▓╚½├▒Ą─▌å└¬ŠĆ
łD6 öM║Ž═Ļ│╔Ą─Ū·├µ
3.4 ą▐╝¶Ū·├µ
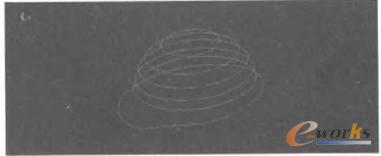
Ū·├µöM║Ž═Ļ«ģ║¾Ż¼ę¬īóČÓėÓĄ─▒Ē├µ▀ģĮń╝¶ŪąĄ¶Ż¼╗“š▀ę¬ī”ā╔éĆ▒Ē├µ▀MąąĄ╣ĮŪĪŻ░▓╚½├▒Ą─├▒ķ▄▓┐ĘųĄ─Ū·├µŻ¼┐╔ęįĖ∙ō■├▒ķ▄Ą─▌å└¬Ū·ŠĆ▀Mąąą▐╝¶Ż¼╚╗║¾īó├▒╔Ē▓┐ĘųĄ─Ū·├µ▀Mąąčė╔ņŻ¼į┘┼c├▒ķ▄▓┐ĘųŪ·├µ▀MąąĄ╣ĮŪĪŻūŅĮKöM║Ž═Ļ│╔Ą─░▓╚½├▒╚ńłD7╦∙╩ŠĪŻą▐╝¶Ū·├µ╩Ūę╗éĆ╝░ŲõĘ▒¼ŹĄ─╣żū„Ż¼ImagewareĄ─▓├╝¶║═├µĄ╣ĮŪ╣”─▄▓╗╩Ū╠½└ĒŽļŻ¼╬ęéā┐╔ęįŽ╚ė├Imagewareśŗ├µŻ¼╚╗║¾╩╣ė├Ųõ╦¹▄ø╝■üĒ▀Mąąą▐╝¶║═├µĄ╣łAĄ─▓┘ū„ĪŻ═©▀^ę╗ŽĄ┴ąĄ─╠Ä└ĒūŅĮK╦∙Ą├ĄĮĄ─░▓╚½├▒╚ńłD7╦∙╩ŠĪŻ
łD7 öM║Ž═Ļ│╔Ą─░▓╚½├▒
3.5 š`▓ŅÖz£y
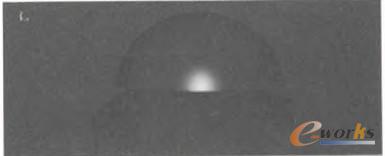
Ū·├µöM║Ž═Ļ│╔║¾Ż¼╬ęéāę¬ī”Ū·├µ┼c³cįŲų«ķgĄ─š`▓Ņ▀MąąÖz£yŻ¼į┌ImagewareųąŻ¼š`▓ŅĄ─Öz£y╩Ū═©▀^“Measure-Surface to-Cloud difference”ųĖ┴ŅüĒ═Ļ│╔Ą─Ż©╚ńłD8Ż®ĪŻ╚ń╣¹Ū·├µ┼c³cįŲų«ķgĄ─öM║Žš`▓Ņ▌^┤¾Ż¼╬ęéāŠ═ę¬ī”Ū·├µ▀Mąąųžą┬öM║Ž╗“š▀╬óš{Ż¼╩╣š`▓Ņ▀_ĄĮ╦∙ę¬Ū¾Ą─Š½Č╚ĪŻ

łD8 š`▓ŅÖz£y
3.6 ╣ŌĒśČ╚║═Ū·┬╩▀B└mąįÖz▓ķ
Ū·├µą▐╝¶═Ļ│╔║¾Ż¼║¾Ų┌▀Ćæ¬įō▀Mąą▒žę¬Ą─▒Ē├µ╣ŌĒśąįĄ─Öz£yĪŻį┌ImagewareųąŪ·├µĄ─╣ŌĒśąį┐╔ęį═©▀^Ū·┬╩╩ßÖz£yęį╝░Ą╚Ė▀ŠĆÖz£yĄ─ĘĮĘ©üĒ═Ļ│╔ĪŻ
(1)Ū·┬╩╩ßÖz£yĘ©
Öz▓ķŪ·├µĄ─Ū·┬╩╩ß┐╔ęį┼ąČ©Ū·├µĄ─Ū·┬╩▀B└mąįŻ¼Ū·┬╩╩ߎÓÓÅų«ķgŪ·┬╩ßśĄ─ĘĮŽ“ęį╝░ķLČ╠Ę┤ė│┴╦Ū·├µĄ─Ū·┬╩ĘĮŽ“┼cŪ·┬╩ųĄĪŻę╗░ŃšfüĒŻ¼į┌═¼ę╗éĆŪ·┬╩╩ß╔ŽĄ─Ū·┬╩ßś│»ų°═¼ę╗éĆĘĮŽ“Ż¼▓óŪęŪ·┬╩ßśĄ─ķLČ╠ŲĘ³▓╗┤¾Ż¼▀@śėĄ─Ū·├µ╣ŌĒśąį▌^║├ĪŻImagewareųąŻ¼╩╣ė├“Evaluate-Curvature-Surfae Needle”ųĖ┴Ņ┐╔ęįÖz“×xĪóyĪóz╚²éĆĘĮŽ“╔ŽĄ─Ū·┬╩╩߯©╚ńłD9Ż®ĪŻ├▒╔ĒŪ·├µ▓┐ĘųĄ─Ū·┬╩ßśķLČ╠╗∙▒Šę╗ų┬Ż¼╦∙ęįŻ¼├▒╔ĒŪ·├µĄ─╣ŌĒśąį┴╝║├ĪŻ
łD9 Ū·┬╩╩ßÖz£y
(2)Ę┤╔õĄ╚Ė▀ŠĆÖz£yĘ©
į┌Ū·├µ╔Ž│÷¼FĄ╚Ė▀ŠĆ║¾Ż¼ą²▐DęĢłD▓ķ┐┤Ė„éĆĮŪČ╚Ą╚Ė▀ŠĆĄ─ŪķørŻ¼ę╗░Ń▓╗│÷¼FĄ╚Ė▀ŠĆŽÓĮ╗Ą─ŪķørŻ¼Š═šf├„Ū·├µĄ─╣ŌĒśąį▀_ĄĮę¬Ū¾ĪŻ╩╣ė├ųĖ┴Ņ“Evaluate-Surface Flow-Reflection Lines”┐╔ęį═©▀^Ą╚Ė▀ŠĆĄ─ĘĮĘ©üĒÖz£yŪ·├µĄ─╣ŌĒśąįŻ©╚ńłD10Ż®ĪŻ

łD10 ĄŪĖ▀ŠĆÖz£y
4 ĮY╩°šZ
─µŽ“╣ż│╠╝╝ągį┌«aŲĘįOėŗųąĄ─æ¬ė├ęčĮø╚šęµę²Ų╚╦éāĄ─ųžęĢĪŻæ¬ė├Ū░Š░ĘŪ│ŻÅVķ¤ĪŻ╦³▓╔ė├╚²ū°ś╦£y┴┐āxī”īŹ╬’▀MąąÆ▀├ĶĄ├ĄĮ³cįŲŻ¼į┘└¹ė├Imageware▄ø╝■▀Mąą³cįŲĄ─╠Ä└Ē┼cŪ·ŠĆĪóŪ·├µĄ─śŗįņŻ¼š`▓ŅĄ─Öz£y┼cĘų╬÷Ż¼╚╗║¾└¹ė├NXĪóCADĄ╚įņą═▄ø╝■▀MąąŪ·├µĄ─╝Ü╣Ø╠Ä└Ē║═ĮYśŗįOėŗūŅĮKĄ├│÷═Ļš¹Ą─īŹ¾w─Żą═ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║─µŽ“╣ż│╠╝╝ągį┌Ū·├µųžśŗ╝░Öz£yųąĄ─æ¬ė├
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/support/11121510462.html






















