



0 ę²čį
ī”ė┌┤¾ą═Ą─Å═ļs┐žųŲŽĄĮyŻ¼╚ń╣¹░l╔·╣╩šŽīóć└ųžė░ĒæĄĮ╚╦Ą─╔·├³║═žö«a░▓╚½Ż¼Ä¦üĒ▓╗┐╔╣└┴┐Ą─ōp╩¦ĪŻę“┤╦Ż¼×ķ┴╦▒ŻšŽīŹļHŽĄĮyĄ─┐╔┐┐ąįĪó┐╔ŠSą▐ąį║═░▓╚½ąįŻ¼Ų╚ŪąąĶę¬Į©┴óę╗éĆ▒O┐žŽĄĮyüĒ▒OČĮš¹éĆ┐žųŲŽĄĮyĄ─▀\ąąĀŅæBŻ¼īŹĢrÖz£yŽĄĮyūā╗»║═╣╩šŽą┼ŽóŻ¼▓╔╚Īėąą¦┤ļ╩®Ż¼Ę└ų╣░l╔·×─ļyąį╩┬╣╩ĪŻ╣╩šŽÖz£y┼cį\öÓ(FDD)╝╝ągŠ═╩Ū×ķ┴╦ØMūŃ“▒O┐žŽĄĮy”Ą─ąĶę¬Č°░lš╣ŲüĒĄ─ĪŻ
FDD╩Ūę╗ķTæ¬ė├ą═Ą─▀ģŠēīW┐ŲŻ¼╔µ╝░┐žųŲ└ĒšōĪóėŗ╦ŃÖC╣ż│╠Īóą┼╠¢╠Ä└ĒĪó╚╦╣żųŪ─▄Ą╚ŽÓĻPīW┐ŲĪŻ├└ć°┬ķ╩Ī└Ē╣żīWį║Ą─Beardė┌1971─Ļ╩ūŽ╚╠ß│÷ė├ĮŌ╬÷╚▀ėÓ┤·╠µė▓╝■╚▀ėÓŻ¼└¹ė├ŽĄĮyĄ─ūįĮM┐Ś╩╣ķ]ŁhŽĄĮyĘĆČ©Ż¼═©▀^▒╚▌^ė^£yŲ„Ą─▌ö│÷Ą├ĄĮŽĄĮy╣╩šŽą┼ŽóĄ─ą┬╦╝ŽļŻ¼ś╦ųŠų°FDD╝╝ągĄ─šQ╔·ĪŻWillskyė┌1976─Ļį┌Automatica░l▒ĒĄ┌ę╗Ų¬FDDĄ─ŠC╩÷šō╬─ą─]ĪŻ1978─ĻHimmelblau╩ū┤╬│÷░µFDDĘĮ├µĄ─īWągīŻų°┐┌]ĪŻ╬ęć°ĻPė┌FDDĄ─蹊┐╩╝ė┌20╩└╝o80─Ļ┤·ĪŻ1985─Ļ╚~ŃyųęĄ╚░l▒ĒFDDĄ─Ą┌ę╗Ų¬įu╩÷╬─š┬Ż¼1994─Ļų▄¢|╚AĄ╚│÷░µć°ā╚Ą┌ę╗▓┐ĻPė┌╣╩šŽÖz£y┼cį\öÓĄ─īWągų°ū„┐┌]ĪŻÅ─1991─ĻŲŻ¼IFAC├┐╚²─Ļš┘ķ_FDDĄ─īŻŅ}Ģ■ūhŻ¼Ųõ╦³ę╗ą®ųžę¬īWągĢ■ūh╚ńCDCĪóACCĄ╚ę▓Č╝įOėąFDDīŻŅ}ĪŻ╣╩šŽį\öÓęč│╔×ķūį┐žĮńĄ─ųžę¬čąŠ┐ĘĮŽ“ų«ę╗Ż¼╚ĪĄ├┴╦║▄ČÓ蹊┐│╔╣¹▒ĀĪŻ
Į³─ĻüĒŻ¼FDDį┌ę╗ą®ą┬ŅIė“▓╗öÓ╚ĪĄ├蹊┐│╔╣¹ĪŻ▒Š╬─öMī”FDDĄ─╚²ŅÉ╗∙▒ŠĘĮĘ©ęį╝░ūŅĮ³Ą├ĄĮ░lš╣Ą─ą┼Žó╚┌║ŽĘĮĘ©ĪóČÓAgentĘĮĘ©Īó¶ö░¶╣╩šŽÖz£yĪóŠWĮj┐žųŲŽĄĮyĄ─╣╩šŽį\öÓĄ╚Ą─蹊┐¼FĀŅ║═┤µį┌å¢Ņ}▀MąąŠC╩÷ĪŻ
1 ╗∙ė┌ĮŌ╬÷─Żą═Ą─ĘĮĘ©
╗∙ė┌ĮŌ╬÷─Żą═Ą─ĘĮĘ©╩Ū蹊┐ūŅįńĪóūŅ╔Ņ╚ļĪóūŅ│╔╩ņĄ─ĘĮĘ©Ż¼┐╔Ęų×ķĀŅæB╣└ėŗĘĮĘ©ĪóĄ╚ār┐šķgĘĮĘ©║═ģóöĄ╣└ėŗĘĮĘ©ĪŻ▒M╣▄▀@╚²ĘNĘĮĘ©╩Ū¬Ü┴ó░lš╣ŲüĒĄ─Ż¼Ą½╦³éāų«ķg┤µį┌ę╗Č©Ą─┬ōŽĄĪŻ╬─½Iėæšō┴╦╦³éāų«å¢Ą─ĻPŽĄŻ¼Ųõųą╗∙ė┌ė^£yŲ„Ą─ĀŅæB╣└ėŗĘ©║═Ą╚ār┐šķgĘ©╩ŪĄ╚ārĄ─ĪŻė╔ė┌įOėŗĘŪŠĆąįŽĄĮyĄ─ĀŅæBė^£yŲ„▒╚▌^└¦ļyŻ¼ę“┤╦ģóöĄ╣└ėŗĘ©▒╚ĀŅæB╣└ėŗĘ©Ė³▀m║Žė┌ĘŪŠĆąįŽĄĮyŻ¼Č°ę╗░ŃĄ─Ą╚ār┐šķgĘ©āH▀mė├ė┌ŠĆąįŽĄĮyĪŻ
1.1 ĀŅæB╣└ėŗĘĮĘ©
╗∙ė┌ĀŅæB╣└ėŗĄ─╣╩šŽį\öÓĘĮĘ©░lš╣ų┴Į±ęčą╬│╔ā╔ĘN╗∙▒ŠĘĮĘ©Ż║(1)Beard╠ß│÷Ą─╣╩šŽÖz£y×V▓©Ų„Ą─ĘĮĘ©Ż╗(2)Menra║═Peshon╠ß│÷Ą─╗∙ė┌Kalman×V▓©Ų„Ą─ĘĮĘ©ĪóDlark╠ß│÷Ą─śŗįņKalman×V▓©Ų„Ļć┴ą╗“Luenbergerė^£yŲ„Ļć┴ąĄ─ĘĮĘ©ĪŻ▀@ŅÉĘĮĘ©īŹ¼F╣╩šŽį\öÓę╗░ŃĘų×ķā╔▓ĮŻ║ę╗╩Ūą╬│╔Üł▓ŅŻ¼Č■╩ŪÅ─Üł▓Ņųą╠ß╚Ī╣╩šŽ╠žš„▀MČ°īŹ¼F╣╩šŽį\öÓĪŻ─┐Ū░ī”ė┌ĀŅæB╣└ėŗĘĮĘ©Ą─蹊┐ų„ę¬╝»ųąį┌╠ßĖ▀Öz£yŽĄĮyī”ė┌Į©─Żš`▓ŅĪóö_äėĪóįļ┬ĢĄ╚╬┤ų¬▌ö╚ļĄ─¶ö░¶ąį╝░ŽĄĮyī”įńŲ┌╣╩šŽĄ─ņ`├¶Č╚ĪŻĮ³─ĻüĒ│÷¼F┴╦įSČÓ╗∙ė┌ĀŅæB╣└ėŗĄ─╣╩šŽį\öÓą┬ĘĮĘ©Ż¼╚ńLuenberger¶ö░¶╣╩šŽÖz£yė^£yŲ„ĘĮĘ©ĪóŠĆąįŠžĻć▓╗Ą╚╩Į(1inear matrix inequalitiesŻ¼LMI)ĘĮĘ©ĪóH2╣└ėŗĪóöĄō■“īäėKalman×V▓©Ų„Īó╗¼─Żė^£yŲ„Ę©ĪóĢrŅlĘų╬÷(time-fre—quency analysisŻ¼TFA)║═ūį▀mæ¬ė^£yŲ„ŽÓĮY║ŽĄ─ĘĮĘ©|16Īó¶ö░¶╣╩šŽÖz£y┼cĘ┤ü┐žųŲĄ─ūŅā×╝»│╔įOėŗĘĮĘ©Īó¶ö░¶lŻ¼╣└ėŗĘĮĘ©”Īó╗∙ė┌ąĪ▓©Ęų╬÷Īó─Ż║²─Żą═Ą─╣╩šŽÖz£y┼cĘųļx(faultdetection and isolationŻ¼FDI)ĘĮĘ©Īó╗∙ė┌ČÓ─Żą═(multiple—modelŻ¼MM)╣└ėŗĄ─╗ņ║Ž╣└ėŗĘĮĘ©ą─¨Ą╚ĪŻ
1.2 Ą╚ār┐šķgĘ©
é„ĮyĄ─Ą╚ār┐šå¢Ę©į┌▀Mąą╣╩šŽį\öÓĢr┤µį┌å¢Ņ}Ż║Ą═ļAĄ╚ārŽ“┴┐į┌ŠĆīŹ¼F▒╚▌^║åå╬Ą½ąį─▄▓╗║├Ż¼Č°Ė▀ļAĄ╚ārŽ“┴┐─▄ĦüĒ▒╚▌^║├Ą─ąį─▄ģsąĶ▌^┤¾Ą─ėŗ╦Ń┴┐Ż¼Ūę«a╔·▌^Ė▀Ą─┬®ł¾┬╩ĪŻßśī”é„ĮyĄ╚ār┐šå¢Ę©Ą─╚▒Ž▌Ż¼ę╗ą®īWš▀╠ß│÷Ė─▀MĘĮĘ©ĪŻ╬─½I╠ß│÷į┌Ą╚ār┐šķgĘ©ųąę²╚ļšŁÄ¦IIR×V▓©Ų„Ż¼į┌╠ßĖ▀ŽĄĮyÖz£yąį─▄Ą─═¼ĢrŻ¼Äū║§▓╗į÷╝ėėŗ╦Ń┴┐Ż¼Ą½Ģ■«a╔·Ė▀Ą─┬®ł¾┬╩ĪŻį┌Ą═ļAĄ╚ārŽ“┴┐ųąę²▀MąĪ▓©ūāōQ─▄«a╔·▌^║├Ą─Öz£yąį─▄Ż¼ģsį÷╝ė┴╦ėŗ╦Ń┴┐Ż¼▓ó╩╣Üł▓Ņ«a╔·Ų„į┌ŠĆīŹ¼FÅ═ļs╗»ĪŻ×ķ┤╦Ż¼╬─½I═©▀^į┌Üł▓Ņ«a╔·Ų„ųąę²╚ļŲĮĘĆąĪ▓©ūāōQ(stationary wavelet transformŻ¼SWT)Ż¼─▄ĮĄĄ═ėŗ╦Ń┴┐Ż¼Ūę┬®ł¾┬╩▌^Ą═ĪŻ└¹ė├╔±ĮøŠWĮjī”Ą╚ārŽ“┴┐▀MąąčaāöŻ¼┐╔╠ßĖ▀ŽĄĮyī”ąĪĘ∙ųĄ╣╩šŽÖz£y┼cĘųļxĄ─£╩┤_ąįĪŻ╗∙ė┌Ģrķg╚▀ėÓĄ─Ą╚ār┐šķgĘ©▓╗ęūīŹ¼F╣╩šŽĘųļxŻ¼¹É─│éĆ╣╩šŽį┌╣╠Č©Ģr┐╠╬╗ė┌Ą╚ār┐šķgĄ─╣╠Č©ĘĮŽ“Ż¼═©▀^▀x╚ĪūŅā×▐DōQŠžĻćŻ¼īó┤╦╣╠Č©ĘĮŽ“┼cŲõ╦³ę“╦žį┌Ą╚ār┐šķgųąī”æ¬Ą─ĘĮŽ“ŽÓĘųļxŻ¼┐╔Ęųļx╣╩šŽ═½ĪŻ
1.3 ģóöĄ╣└ėŗĘĮĘ©
ģóöĄ╣└ėŗĘ©╩ŪĖ∙ō■─Żą═ģóöĄ╝░ŽÓæ¬Ą─╬’└ĒģóöĄūā╗»Ą─Įyėŗ╠žąįüĒÖz£y║═Ęųļx╣╩šŽĪŻė╔ė┌╬’└ĒģóöĄŠ▀ėą├„┤_Ą─╬’└Ē║¼┴xŻ¼┐╔ė╔╬’└ĒģóöĄĄ─«É│ŻĄ├ĄĮ╣╩šŽČ©╬╗║═ŅA╣└ĘĮ├µĄ─├„┤_ą┼ŽóĪŻ┼cĀŅæB╣└ėŗĘ©ŽÓ▒╚Ż¼ģóöĄ╣└ėŗĘ©Ė³└¹ė┌╣╩šŽĄ─ĘųļxĪŻļSų°čąŠ┐Ą─▀Mš╣Ż¼╗∙ė┌ģóöĄ╣└ėŗĄ─╣╩šŽį\öÓĘĮĘ©ėųėąę╗ą®ą┬│╔╣¹ĪŻ└²╚ńŻ║╗∙ė┌─Ż║²═Ų└ĒĄ─ģóöĄ╣└ėŗĘĮĘ©ą─Īó╗∙ė┌╔±ĮøŠWĮjĄ─ģóöĄ╣└ėŗĘĮĘ©Ż¼╗∙ė┌łDŽ±ą┼╠¢«a╔·Ų„Ą─ģóöĄ╣└ėŗĘĮĘ©äóĄ╚Ż¼▀@ą®ĘĮĘ©Č╝╠ßĖ▀┴╦╣╩šŽÖz£y║═Ęųļxąį─▄ĪŻ
2 ╗∙ė┌ą┼╠¢╠Ä└ĒĄ─ĘĮĘ©
╗∙ė┌ą┼╠¢╠Ä└ĒĄ─ĘĮĘ©╩Ū└¹ė├ą┼╠¢─Żą═Ż¼╚ńŽÓĻP║»öĄĪóĖ▀ļAĮyėŗ┴┐ĪóŅlūVĪóūį╗žÜw╗¼äėŲĮŠ∙║═ąĪ▓©ūāōQĄ╚Ż¼ų▒ĮėĘų╬÷┐╔£yą┼╠¢Ż¼╠ß╚ĪĘĮ▓ŅĪóĘ∙ųĄĪóŅl┬╩Ą╚ą┼ŽóüĒ▀Mąą╣╩šŽÖz£y┼cį\öÓĪŻ▀@ĘNĘĮĘ©▀mė├ė┌ŠĆąįŽĄĮy║═ĘŪŠĆąįŽĄĮyĪŻĄ½╩ŪŻ¼▒▄ķ_ī”Ž¾öĄīW─Żą═Ą─ā׳c╩ŪīŹ¼F║åå╬ĪóīŹĢrąį▌^║├Ż╗╚▒³cät╩Ūī”Øōį┌Ą─įńŲ┌╣╩šŽĄ─į\öÓ’@Ą├▓╗ūŃŻ¼ČÓė├ė┌╣╩šŽÖz£yŻ¼ī”╣╩šŽĘųļx║═į\öÓĄ─ą¦╣¹▓╗║▄└ĒŽļŻ¼╚¶┼cŲõ╦¹ĘĮĘ©ĮY║Ž┐╔═¹╠ßĖ▀╣╩šŽį\öÓąį─▄ĪŻ
2.1 ╗∙ė┌ąĪ▓©ūāōQĄ─ĘĮĘ©
ąĪ▓©ūāōQ╩Ūę╗ĘNą┼╠¢Ą─Ģrķgę╗│▀Č╚Ęų╬÷ĘĮĘ©Ż¼Š▀ėąČÓĘų▒µ┬╩Ęų╬÷Ą─╠ž³cĪŻį┌ĢrŅlė“Č╝Š▀ėą▒Ēš„ą┼╠¢Šų▓┐╠žš„Ą──▄┴”Ż«▀m║Žė┌ĘŪŲĮĘĆą┼╠¢Ą─Ųµ«ÉąįĘų╬÷ĪŻ└¹ė├▀B└mąĪ▓©ūāōQ┐╔ęįģ^Ęųą┼╠¢═╗ūā║═įļ┬ĢŻ¼Č°└¹ė├ļx╔óąĪ▓©ūāōQ┐╔Öz£yļSÖCą┼╠¢Ņl┬╩ĮYśŗĄ─ūā╗»ĪŻ
ąĪ▓©ūāōQī”įļ┬ĢĄ─ęųųŲ─▄┴”▌^ÅŖŻ«Š▀ėą▌^Ė▀Ą─ņ`├¶Č╚Ż¼▀\╦Ń┴┐ę▓▓╗┤¾Ż¼╩Ūę╗ĘN║▄ėąŪ░═ŠĄ─ĘĮĘ©ĪŻĮ³─ĻüĒŻ¼└¹ė├ąĪ▓©ūāōQĄ─ā׳cŻ¼īóąĪ▓©ūāōQ┼cöĄīW─Żą═Īó╔±ĮøŠWĮjĪóīŻ╝ꎥĮyĪó─Ż║²└ĒšōĪóŠžĻćŲµ«ÉųĄĄ╚ĘĮĘ©ŽÓĮY║ŽŻ¼╠ß│÷┴╦ę╗ą®ą┬Ą─FDDĘĮĘ©Ż¼▀Mę╗▓Į╠ßĖ▀┴╦äėæBŽĄĮyĄ─╣╩šŽÖz£y┼cį\öÓąį─▄Ż¼į┌īŹļH╣ż│╠æ¬ė├ųą½@Ą├│╔╣”ĪŻ
2.2 ų„į¬Ęų╬÷Ę©
ų„į¬Ęų╬÷Ę©(principal component analysisŻ¼PCA)╩Ū└¹ė├ĮyėŗįŁ└ĒüĒĮ©┴ó├Ķ╩÷ŽĄĮyĄ─Ą═ŠS─Żą═Ż¼─▄ėąą¦Ąžē║┐söĄō■║═╠ß╚Ī╣╩šŽą┼ŽóŻ¼╠žäe▀m║Žė┌┤¾ą═Ą─ĘĆæBäėæBŽĄĮy▀Mąą▒O┐žŻ¼Ūę─▄īŹ¼Fį┌ŠĆīŹĢrį\öÓĪŻ
─┐Ū░PCA┼cŲõ╦³└ĒšōŽÓĮY║ŽĄ─╣╩šŽį\öÓĘĮĘ©Ż¼š²╠Äė┌┐ņ╦┘░lš╣ų«ųąŻ¼╚ńīóPCA┼cąĪ▓©Ęų╬÷ŽÓĮY║ŽŻ¼īóŲõ═ŲÅVĄĮČÓ│▀Č╚Ūķą╬Ż¼Ė³┤¾Ąžē║┐söĄō■ŠžĻćŻ╗īóĘŪŠĆąįPCAĘĮĘ©┼cÅĮŽ“╗∙║»öĄ(radial basic functionŻ¼RBF)╔±Įøį¬ŠWĮjŽÓĮY║Ž▀Mąą╣╩šŽÖz£yĢrŻ¼─▄½@Ą├Ė³║├Ą─╣╩šŽÖz£yņ`├¶Č╚║═╣╩šŽÖz£yŠ½Č╚ĪŻPCAĘĮĘ©║═╗∙ė┌▀^│╠äėæB─Żą═Ą─╣╩šŽį\öÓĘĮĘ©ŽÓĮY║ŽŻ¼┐╔ī”ę╗ą®Å═ļs╣╩šŽ║═▀^│╠ā╚▓┐╣╩šŽ▀Mąą£╩┤_į\öÓŻ¼īó╩ŪĮ±║¾▀Mę╗▓Į蹊┐Ą─ĘĮŽ“ĪŻ
3 ╗∙ė┌ų¬ūRĄ─ĘĮĘ©
╚╦╣żųŪ─▄╝░ėŗ╦ŃÖC╝╝ągĄ─’w╦┘░lš╣Ż¼×ķ╣╩šŽį\öÓ╝╝ąg╠ß╣®┴╦ą┬Ą─└Ēšō╗∙ĄAŻ¼«a╔·┴╦╗∙ė┌ų¬ūRĄ─į\öÓĘĮĘ©ĪŻŻ¼┤╦ĘĮĘ©ę²╚ļį\öÓī”Ž¾Ą─įSČÓą┼ŽóŻ¼╠žäe╩Ū┐╔ęį│õĘų└¹ė├īŻ╝ęį\öÓų¬ūRŻ¼Č°Ūę╦³Š▀ėą“ųŪ─▄“╠žąįŻ¼╩Ūę╗ĘN║▄ėą╔·├³┴”Ą─ĘĮĘ©Ż¼ė╚Ųõ╩Ūį┌ĘŪŠĆąįŽĄĮyŅIė“ĪŻ╗∙ė┌ų¬ūRĄ─ĘĮĘ©ų„ę¬┐╔Ęų×ķŻ║╔±ĮøŠWĮjĘĮĘ©Īó─Ż║²öĄīWĘĮĘ©ĪóČ©ąį─Żą═Ą─ĘĮĘ©ĪóīŻ╝ꎥĮyĘĮĘ©Īó╣╩šŽśõĘų╬÷ĘĮĘ©Īóą┼Žó╚┌║ŽĘĮĘ©║═╗∙ė┌AgentĄ─ĘĮĘ©Ą╚ĪŻ
3.1 ╗∙ė┌╔±ĮøŠWĮjĄ─ĘĮĘ©
╔±ĮøŠWĮjį┌╣╩šŽį\öÓŅIė“Ą─æ¬ė├蹊┐ų„ę¬╝»ųąį┌ā╔éĆĘĮ├µŻ║ę╗╩ŪÅ──Ż╩ĮūRäeĄ─ĮŪČ╚Ż«æ¬ė├╔±ĮøŠWĮjū„×ķĘųŅÉŲ„▀Mąą╣╩šŽį\öÓŻ╗Č■╩Ūīó╔±ĮøŠWĮj┼cŲõ╦¹į\öÓĘĮĘ©ŽÓĮY║ŽČ°ą╬│╔Ą─Å═║Ž╣╩šŽį\öÓĘĮĘ©ĪŻ╚╦╣ż╔±Įøį¬ŠWĮjė├ė┌╣╩šŽį\öÓų„ę¬ėą╦─ĘNĘĮ╩Į(1)ė├╔±Įøį¬ŠWĮj«a╔·Üł▓ŅŻ╗(2)ė├╔±Įøį¬ŠWĮjįuārÜł▓ŅŻ╗(3)ė├╔±Įøį¬ŠWĮjū÷▀Mę╗▓Įį\öÓŻ╗(4)ė├╔±Įøį¬ŠWĮjū„ūį▀m欚`▓ŅčaāöĪŻ
░č─Ż║²öĄīW┼c╔±ĮøŠWĮjŽÓĮY║ŽŻ¼┐╔ęįį┌╔±ĮøŠWĮj┐“╝▄Ž┬ę²╚ļČ©ąįų¬ūRŻ¼─▄Ą├ĄĮĖ³║├Ą─į\öÓąį─▄Ż¼Š▀ėąŠ▐┤¾Ą─æ¬ė├Ū░Š░ĪŻ┬ō║ŽČÓéĆ╔±ĮøŠWĮjĄ─į\öÓĘĮĘ©─▄╠ßĖ▀╣╩šŽį\öÓĄ─┐╔┐┐ąįĪŻę“×ķ╔±ĮøŠWĮj┤µį┌ųT╚ńŻ║ė¢ŠÜśė▒Š½@╚Ī└¦ļyĪóŠWĮjÖÓųĄ▒Ē▀_ĘĮ╩Įļyęį└ĒĮŌĪó║÷ęĢ┴╦ŅIė“īŻ╝ęĄ─Įø“×ų¬ūRĄ╚å¢Ņ}Ż¼╦∙ęį═©▀^┼c╗∙ė┌─Żą═Ą─ĘĮĘ©ĪóīŻ╝ꎥĮyĪóą┼Žó╚┌║ŽĄ╚└ĒšōŽÓĮY║ŽŻ¼┐╔ęįÅøčaŲõ▓╗ūŃĪŻ
3.2 ╗∙ė┌─Ż║²öĄīWĄ─ĘĮĘ©
─Ż║²╣╩šŽį\öÓĘĮĘ©▒Ńė┌╠Ä└ĒČ©ąįų¬ūRŻ¼▀mė├ė┌£y┴┐ųĄ▌^╔┘Ūę¤oĘ©½@Ą├Š½┤_─Żą═Ą─ŽĄĮyĪŻŲõā׳c╩ŪŻ║ėŗ╦Ń║åå╬Īóæ¬ė├ĘĮ▒ŃĪóĮYšōų▒ė^Īó£p╔┘įSČÓ▓╗┤_Č©ę“╦žĮoį\öÓ╣żū„ĦüĒĄ─└¦ļyŻ╗╚▒³c╩ŪŻ║śŗįņļ`ī┘║»öĄėąę╗Č©Ą─ų„ė^ę“╦žŻ¼Č°Ūę╚ń╣¹╠žš„į¬╦žĄ─▀xō±▓╗║Ž└ĒŻ¼īóė░Ēæį\öÓĮY╣¹Ż¼╔§ų┴įņ│╔į\öÓ╩¦öĪĪŻ╗∙ė┌─Ż║²öĄīWĄ─ĘĮĘ©ų„ę¬ėąŻ║(1)╗∙ė┌─Ż║²─Żą═Ą─╣╩šŽį\öÓĘĮĘ©Ż╗(2)╗∙ė┌ūį▀mæ¬─Ż║²ķōųĄĄ─Üł▓ŅįuārĘĮĘ©Ż╗(3)╗∙ė┌─Ż║²Š█ŅÉĄ─Üł▓ŅįuārĘĮĘ©Ż╗(4)╗∙ė┌─Ż║²▀ē▌ŗĄ─Üł▓ŅįuārĘĮĘ©Ż╗(5)╗∙ė┌─Ż║²─Ż╩ĮūRäeĄ─╣╩šŽį\öÓĘĮĘ©ĪŻå╬╝ā└¹ė├─Ż║²═Ų└Ē▀Mąą╣╩šŽį\öÓŠ▀ėąę╗Č©Ą─ŠųŽ▐ąįŻ¼ę╗░Ń└¹ė├Å═║Ž╩ĮĘĮĘ©üĒ▀Mąą╣╩šŽį\öÓŻ¼╚ń─Ż║²╣╩šŽśõĘ©Īó─Ż║²īŻ╝ꎥĮyĘ©Īó─Ż║²╔±ĮøŠWĮjĘ©┐┌Īó─Ż║²ąĪ▓©╔±ĮøŠWĮjĘ©Īó─Ż║²ą┼Žó╚┌║ŽĘ©nńÓĄ╚Ż¼▀@ą®ĘĮĘ©Ą─į\öÓąį─▄Ą├ĄĮ├„’@╠ßĖ▀ĪŻ
3.3 ╗∙ė┌Č©ąįĄ─ĘĮĘ©
į┌īŹļHæ¬ė├ųąŻ¼╗∙ė┌Č©┴┐ą┼ŽóĄ─╣╩šŽį\öÓĘĮĘ©ė╔ė┌ĘNĘNįŁę“¤oĘ©īŹ¼FŻ¼▒╚╚ńŻ║╣╩šŽ▓╗─▄ė├ĮŌ╬÷─Żą═║Ž└ĒĄ─├Ķ╩÷Ż╗ŽĄĮyĄ─Ž╚“×ų¬ūR▓╗┤_Č©Īó▓╗═ĻéõŻ╗ŽĄĮyų¬ūR╩ŪČ©ąįų¬ūRŻ╗ŽĄĮy▒Š╔Ē╠½Å═ļsŻ¼ų╗─▄▓╔ė├Į³╦Ų─Żą═üĒ├Ķ╩÷Ą╚ĪŻ×ķ┴╦ĮŌøQ▀@ą®å¢Ņ}Ż¼įSČÓīWš▀▓╔ė├Č©ąį─Żą═Ą─ĘĮĘ©üĒ▀Mąą╣╩šŽį\öÓŻ¼ų„ꬥ─ĘĮĘ©ėąŻ║(1)╗∙ė┌Č©ąįĘ┬šµ└ĒšōĄ─į\öÓ╝╝ągŻ╗(2)╗∙ė┌Č©ąį▀^│╠└ĒšōĄ─į\öÓ╝╝ągŻ╗(3)╗∙ė┌Ä¦Ę¹╠¢ėąŽ“łDĄ─į\öÓ╝╝ągŻ╗(4)╗∙ė┌Č©ąįė^£yŲ„Ą─į\öÓ╝╝ągĪŻ└¹ė├Č©ąįĘĮĘ©▀Mąą╣╩šŽį\öÓ┐╔ęį┐╦Ę■Č©┴┐ĘĮĘ©Ą─¶ö░¶ąį║═ŅlĒæ╠žąįŽÓī”▌^▓ŅĄ─╚▒Ž▌Ż¼╠ßĖ▀į\öÓŠ½┤_Č╚Ż¼£p╔┘š`ł¾Ż¼Ą½Č©ąįĘĮĘ©ę▓ėąŲõūį╔ĒĄ─ŠųŽ▐ąįĪŻ×ķ┤╦╠ß│÷┴╦īóČ©ąįĘĮĘ©┼cČ©┴┐ĘĮĘ©ŽÓĮY║ŽĄ─╣╩šŽį\öÓą┬ĘĮĘ©Ż¼╚ń╗∙ė┌Č©ąį═Ų└Ē┼cČ©┴┐Ę┬šµ╝»│╔Ą─╣╩šŽį\öÓ═Ų└ĒĘĮĘ©ĪóļSÖCČ©ąį═Ų└ĒĘĮĘ©┼PĻ¢Ą╚Ż¼▀@ą®ĘĮĘ©┐╔ęįÅøčaĖ„ūįĄ─▓╗ūŃŻ¼īŹ¼Fā×ä▌╗źčaĪŻ
3.4 ╗∙ė┌īŻ╝ꎥĮyĄ─į\öÓĘĮĘ©
é„ĮyĄ─īŻ╝ꎥĮy╣╩šŽį\öÓĘĮĘ©┤µį┌ų°ę╗ą®ūį╔ĒļyęįĮŌøQĄ─å¢Ņ}Ż¼╚ńŻ║ų¬ūR½@╚ĪĄ─“Ų┐Ņi”å¢Ņ}Īó▀ē▌ŗ═Ų└ĒĄ─“ĮM║Ž▒¼š©”Ż╗į┌ūį▀mæ¬ĪóīW┴Ģ─▄┴”╝░īŹĢrąįĘĮ├µę▓ėąŠųŽ▐ąįĪŻ×ķ┐╦Ę■▀@ą®▓╗ūŃŻ¼ėą╚╦╠ß│÷Ī½ą®ą┬Ą─īŻ╝ꎥĮy╣╩šŽį\öÓĘĮĘ©ĪŻ╗∙ė┌PetriŠWĮ©┴óī”Ž¾ąą×ķ─Żą═Ż¼ĮY║ŽīŻ╝ꎥĮyĄ─ā׳cŻ¼ī”ļŖ┴”ŽĄĮy▌öļŖŠWĮj╣╩šŽ▀Mąąį\öÓĪŻįōĘĮĘ©▓╗āHėąą¦Īó£╩┤_Īó═©ė├Ż¼▀Ć╠ßĖ▀┴╦╣╩šŽį\öÓ╦┘Č╚ĪŻ╬─½I░č▀zé„╦ŃĘ©┼cīŻ╝ꎥĮyŽÓĮY║Ž▀Mąą╣╩šŽį\öÓŻ¼╠ßĖ▀┴╦ŽĄĮyęųųŲįļ┬ĢĄ──▄┴”Ż¼═¼Ģr▌^║├ĄžĮŌøQ┴╦═Ų└Ē╦┘Č╚║═ų¬ūR½@╚Ī└¦ļyĄ─å¢Ņ}ĪŻ═¼śėŻ¼į┌īŻ╝ꎥĮyųąę²╚ļ╣╩šŽśõŻ¼┐╔ęį▒▄├ŌĮ©┴óĘ▒¼ŹČ°²ŗ┤¾Ą─ęÄätÄņĪŻ╗∙ė┌╚╦╣ż╔±ĮøŠWĮjĄ─īŻ╝ꎥĮy╣╩šŽį\öÓĘĮĘ©║═╗∙ė┌─Ż║²öĄīWĄ─īŻ╝ꎥĮyį\öÓĘĮĘ©Ż¼Č╝─▄╠ßĖ▀╣╩šŽį\öÓą¦┬╩Ż¼Ūęėą└¹ė┌ų¬ūRĄ─╔²╝ēĪóĖ³ą┬┼cŠSūoĪŻ
3.5 ╣╩šŽśõĘų╬÷ĘĮĘ©
└¹ė├╣╩šŽśõĘų╬÷Ę©(fault tree analysisŻ¼FTA)▀Mąą╣╩šŽį\öÓ╝µŅÖ┴╦╗∙ė┌ęÄät║═╗∙ė┌Č©┴┐─Żą═Ą─ā׳cŻ¼×ķÅ═ļsŽĄĮyĄ─╣╩šŽį\öÓ╠ß╣®┴╦ę╗ĘNėąą¦═ŠÅĮŻ¼╩ŪīŹļHŽĄĮyųą│Żė├Ą─▒╚▌^ėąą¦Ą─į\öÓĘĮĘ©Ż¼Į³─ĻüĒėų│÷¼Fę╗ą®ą┬Ą─▀Mš╣ĪŻį┌ĮøĄõ╣╩šŽśõųžę¬Č╚Ęų╬÷ĘĮĘ©Ą─╗∙ĄA╔Žę²╚ļ─Ż║²╝»║Ž└ĒšōŻ¼┐╔ĮŌøQ┐╔┐┐ąį╣ż│╠ųąę“öĄō■▓╗│õĘųȰĦüĒĄ──Ż║²ąįŻ¼ėąą¦Åøča┴╦ĮøĄõĖ┼┬╩ĘĮĘ©Ą─▓╗ūŃĪŻ╬─½I═©▀^į┌ĮoČ©╣╩šŽśõĒö╩┬╝■║═Ąū╩┬╝■Ė┼┬╩├Ķ╩÷Ą─╗∙ĄA╔ŽŻ¼ėŗ╦Ń╣╩šŽśõūŅąĪĖŅ╝»Ą─ųžę¬Č╚Ż¼▓óį┌┴┐╝ē╔Ž▀MąąĘų╬÷▒╚▌^Ż¼×ķŽĄĮyĄ─╣╩šŽį┤╦čīż╠ß╣®Š▀¾wėąą¦Ą─£yįć▓Į¾EŻ¼▀mė├ė┌┤¾ą═Å═ļsŽĄĮyĄ─╣╩šŽį\öÓŻ¼į┌╣ż│╠╔ŽėąÅVĘ║Ą─æ¬ė├Ū░Š░ĪŻPetriŠWŅ«ė├ė┌▒Ē▀_ŽĄĮy▀ē▌ŗĻPŽĄŻ¼═Ļ│╔ų¬ūR▒Ē╩Š║═į\öÓ═Ų└ĒŻ¼╬─½I╠ß│÷░čPetriŠW┼c╣╩šŽśõĘų╬÷ŽÓĮY║ŽĄ─╣╩šŽį\öÓĘĮĘ©Ż¼ØMūŃ┴╦īŹļHÅ═ļsŽĄĮyĄ─ąĶ꬯¼╠ßĖ▀┴╦į\öÓąį─▄ĪŻ
3.6 ╣╩šŽį\öÓĄ─ą┼Žó╚┌║ŽĘĮĘ©
╗∙ė┌ą┼Žó╚┌║ŽįŁ└ĒĄ─ųŪ─▄╣╩šŽį\öÓĘĮĘ©Ż¼╩Ū═©▀^ČÓé„ĖąŲ„½@╚ĪįOéõĀŅæBĄ─╠žš„ą┼╠¢üĒ╠ß╚Īš„šūŻ¼▓ó▀MąąČÓīė├µĄ─ĻP┬ōĮM║ŽĪóöĄō■▀xō±Ż¼Å─Č°½@Ą├ī”į\öÓī”Ž¾╣╩šŽą┼ŽóĖ³┐╔┐┐Ą─šJūR║═Øōį┌╣╩šŽ░lš╣┌ģä▌Ą─æBä▌įu╣└ĪŻą┼Žó╚┌║Žė├ė┌╣╩šŽį\öÓĄ─Ųę“ėą╚²éĆĘĮ├µŻ║ę╗╩ŪČÓé„ĖąŲ„ą╬│╔▓╗═¼═©Ą└Ą─ą┼╠¢Ż╗Č■╩Ū═¼ę╗ą┼╠¢ą╬│╔┴╦▓╗═¼Ą─╠žš„ą┼ŽóŻ╗╚²╩Ū▓╗═¼į\öÓ═ŠÅĮĄ├│÷┴╦ėąŲ½▓ŅĄ─į\öÓĮYšōĪŻ╚┌║Žį\öÓĄ─ūŅĮK─┐ś╦╩ŪŠC║Ž└¹ė├Ė„ĘNą┼ŽóŻ¼╠ßĖ▀į\öÓ£╩┤_┬╩ĪŻ
ą┼Žó╚┌║Ž╣╩šŽį\öÓĘĮĘ©ų„ę¬░³└©Ż║BayesūCō■└ĒšōĪó─Ż║²╚┌║ŽĪóD-SūCō■═Ų└ĒĪó╔±ĮøŠWĮją┼Žó╚┌║ŽĄ╚ĪŻ─┐Ū░ėų╠ß│÷┴╦įSČÓÅ═║Žį\öÓĘĮĘ©Ż¼╚ń─Ż║²╔±ĮøŠWĮją┼Žó╚┌║ŽĘĮĘ©Īó╝»│╔ąĪ▓©╔±ĮøŠWĮją┼Žó╚┌║ŽĘĮĘ©Īó╗∙ė┌ČÓ╝ēų¦│ųŽ“┴┐ÖC(multi-class support vector machinesŻ¼MSVMs)Ą─╝»ųą║═Ęų▓╝╩ĮöĄō■╚┌║ŽĘĮĘ©Īó╔±ĮøŠWĮj┼cūCō■═Ų└ĒŽÓĮY║ŽĄ─ą┼Žó╚┌║ŽĘĮĘ©▓ĖéāĄ╚ĪŻ
3.7 ╗∙ė┌AgentĄ─╣╩šŽį\öÓ
į\öÓAgent╩Ūę╗ĘNŪČ╠ū╩ĮČÓAgentĮM┐Ś─Żą═Ż¼╦³īóČÓé„ĖąŲ„ą┼Žó╚┌║Ž╦ŃĘ©ę²╚ļAgentįOėŗųąŻ¼įOėŗ│÷ę╗ĮMĘų╣żģfū„Ą─ČÓAgentŽĄĮy(multi-agent systemŻ¼MAS)ĪŻįōĘĮĘ©▓╗āH─▄╠ßĖ▀į\öÓ£╩┤_┬╩Ż¼Č°Ūęį÷ÅŖŁhŠ│Ą─▀mæ¬ąįŻ¼╩╣ŽĄĮyį┌▀\ąą▀^│╠ųą░l¼F║══┌Š“ų¬ūRŻ¼╠ßĖ▀īW┴Ģ─▄┴”Ż¼īŹ¼Fį\öÓŽĄĮyąį─▄Ą─ūį╬ę═Ļ╔ŲĪó░lš╣║═╠ßĖ▀Ż¼║▄▀m║Ž┤¾ęÄ─Żį\öÓå¢Ņ}Ą─ųŪ─▄Ū¾ĮŌĪŻ
ę╗░ŃAgent╣╩šŽį\öÓŽĄĮyąĶę¬ĮŌøQĄ─ĻPµIå¢Ņ}ėąŻ║
(1)╣╩šŽą┼╠¢Ą─Öz£yŻ¼╠žš„ą┼ŽóĄ─╠ß╚ĪŻ╗(2)╣╩šŽį\öÓAgentĄ─┐╠«ŗŻ╗(3)╣▄└Ē┐žųŲAgent╝░öĄō■═┌Š“AgentĄ─iņ»ėŗŻ╗(4)Ė„Agentų«å¢Ą─═©ą┼┼cģfū„ĪŻ─┐Ū░ų„ꬥ─į\öÓĘĮĘ©ėąŻ║╗∙ė┌─Ż║²öĄīW╚┌║Žį\öÓAgentŻ¼╗∙ė┌─Ż║²╔±ĮøŠWĮj╚┌║ŽAgent[38lĪó╗∙ė┌D-SūCō■└ĒšōĄ─╚┌║ŽAgentĪó╗∙ė┌░Ė└²═Ų└Ē(case-based reasoningŻ¼CBR)Ą─ČÓAgentĘĮĘ©Ą╚ĪŻī”ė┌ę╗éĆäėæBĘų▓╝Ą─ĪóīŹĢrĄ─║═▓╗┤_Č©Ą─Å═ļsŽĄĮyŻ¼MASį┌╣╩šŽĄ─Ęų▒µĪóį\öÓ║═┐žųŲĘĮ├µ▒Ē¼F│÷┴╦śO┤¾Ą─ā×ä▌Ż║╦³═©▀^┼c╦∙╠ÄŁhŠ│Īó╚╦ęį╝░éĆ¾wų«ķg▀MąąŽÓ╗źģfū„▒Ē¼F│÷ę╗Č©Ą─╔ńĢ■ųŪ─▄Ż¼─▄ĮŌøQę╗ą®é„Įy╚╦╣żųŪ─▄(artificial intelligenceŻ¼AI)¤oĘ©ĮŌøQĄ─┤¾ęÄ─ŻÅ═ļsĄ─å¢Ņ}Ż¼¼Fęč│╔×ķAIŅIė“蹊┐Ą─ų„┴„ĘĮŽ“ĪŻ
4 ╣╩šŽÖz£y┼cį\öÓĄ─蹊┐¤ß³c
4.1 ¶ö░¶FDD
ė╔ė┌īŹļHŽĄĮy┐é┤µį┌įļ┬ĢĪóö_äėĪó─Żą═ģóöĄözäė╝░Į©─Żš`▓ŅĄ╚▓╗┤_Č©ąįę“╦žŻ¼ę“┤╦蹊┐▓╗┤_Č©ŽĄĮyĄ─╣╩šŽÖz£y┼cį\öÓĘĮĘ©ęį╝░FDDĄ─¶ö░¶ąį¼Fęč│╔×ķFDDŅIė“蹊┐Ą─¤ß³cĪŻ─┐Ū░ī”ė┌¶ö░¶╣╩šŽį\öÓŽĄĮyĄ─蹊┐ĘĮĘ©ų„ę¬ėąŻ║(1)└¹ė├RicattiĘĮ│╠ĘĮĘ©ĪóLMIĘĮĘ©ĪóH∞ ┐žųŲĪóH2┐žųŲĪól1╣└ėŗĄ╚¶ö░¶┐žųŲ└Ēšō▀Mąąā×╗»įOėŗ┐┌Ż╗(2)įOėŗ¶ö░¶╣╩šŽÖz£y×V▓©Ų„(robust fault detection filterŻ¼RFDF)üĒīŹ¼FŲõī”▒╗┐žī”Ž¾─Żą═š`▓Ņ║═ŽĄĮy▓╗┤_Č©ąįę“╦žĄ─Ė╔ö_ĮŌ±ŅŻ╗(3)ŽĄĮy┤µį┌▓╗┤_Č©ąįĮ©─Żš`▓ŅĄ─ŪķørŽ┬Ż¼Ę┤ü┐žųŲŲ„┼cRFDF▓╗─▄īŹ¼F═Ļ╚½¬Ü┴óįOėŗŻ¼ķ]Łh┐žųŲŽĄĮyĄ─ąį─▄ųĖś╦┼c╣╩šŽÖz£y×V▓©Ų„Ą─¶ö░¶ąį─▄ųĖś╦Ģ■ŽÓ╗źė░ĒæĪŻ╬─½I╠ß│÷Ą─╗∙ė┌ĀŅæBė^£yŲ„Ą─Ę┤ü┐žųŲ┼cRFDF╝»│╔įOėŗūŅā×╗»ĘĮĘ©Ż¼┐╔═©▀^▀m«ö▀x╚Ī║¾×V▓©Ų„Ż¼▀_ĄĮ┐žųŲŲ„║═RFDF¬Ü┴óįOėŗĢr╦∙īŹ¼FĄ─ąį─▄ųĖś╦Ż¼ĮŌøQūŅā×╝»│╔įOėŗå¢Ņ}Ż╗(4)ī”ė┌▓╗┤_Č©ĘŪŠĆąįŽĄĮyŻ¼╬─½I╠ß│÷╗∙ė┌ūį▀mæ¬į÷ęµ╗¼äėė^£yŲ„Ą─╗¼äė┐žųŲŲ„ĘĮĘ©Ż¼└¹ė├ģóöĄ╗»Ą─š²ŪąļpŪ·║»öĄū„×ķ┐žųŲŲ„Ą─ķ_ĻP║»öĄŻ¼═©▀^▀xō±║Ž▀mĄ─ķ_ĻP║»öĄģóöĄŻ¼┐╔ęį╩╣ė^£yŲ„Ž╚ė┌┐žųŲŲ„╩šö┐Ż¼ķ_ĻP║»öĄĄ─ūį▀mæ¬į÷ęµį┌╩╣ŽĄĮy½@Ą├▌^Ą═Ą─╣└ėŗ║═▌ö│÷Ė·█Öš`▓ŅĄ─═¼Ģrį÷ÅŖ┴╦ŽĄĮyĄ─¶ö░¶ąįĪŻ
4.2 ŠWĮj┐žųŲŽĄĮyĄ─╣╩šŽį\öÓ
ŠWĮj┐žųŲŽĄĮy(networked control systemŻ¼NCS)╩Ūį┌Ę┤ü┐žųŲŽĄĮyĄ─┐žųŲ╗ž┬Ęųą═©▀^Ė„ĘNŠWĮją┼Ą└▀BĮėČ°ą╬│╔Ą─ķ]ŁhŽĄĮyŻ¼Š▀ėą┘Yį┤╣▓ŽĒĪó▒Ńė┌ŽĄĮy░▓čbĪóŠSūoĪóöUš╣Ą╚ā׳cŻ╗ŠWĮjĄ─Įķ╚ļę▓ĦüĒųT╚ńŻ║ą┼Žóé„▌öčė▀tĪóüG╩¦ą┼Žó░³ĪóĦīÆ┘Yį┤Ž▐ųŲĄ╚å¢Ņ}ĪŻ┐žųŲŽĄĮyŠWĮj╗»Ä¦üĒĄ─ūŅ┤¾ūā╗»Š═╩Ūę╗éĆą┬Ą─öĄō■Į╗ōQŁhŠ│Ż¼į┌┤╦ą┬ŁhŠ│ųąęį═∙蹊┐Ą─┐žųŲ└Ēšōå¢Ņ}Š∙æ¬ėąŽÓæ¬Ą─ą┬ūā╗»║═ą┬ĮYšōĪŻļSų°é„Įy┐žųŲŽĄĮyŠWĮj╗»Ą─░lš╣Ż¼Į³─ĻüĒī”NCSĄ─蹊┐ę²Ų┴╦▒ŖČÓīWš▀Ą─┼d╚żŻ¼ė┐¼FįSČÓ│╔╣¹ĪŻ
×ķ┴╦┤_▒ŻŠWĮj┐žųŲŽĄĮy▀\ąąĄ─┐╔┐┐ąįŻ¼ī”ė┌ŠWĮj┐žųŲŽĄĮyĄ─╣╩šŽį\öÓå¢Ņ}Ą─蹊┐ę▓ų┴ĻPųžę¬Ż¼─┐Ū░Ą─蹊┐│╔╣¹▀Ć▒╚▌^╔┘Ż¼ų„ę¬ėąŻ║═©▀^ģóöĄįOėŗĖ╔ö_ĮŌ±ŅŽ“┴┐Ą─ĘĮĘ©Ż╗└¹ė├LMI└ĒšōįOėŗNCSĄ─╣╩šŽį\öÓ×V▓©Ų„Ż¼═©▀^ę²╚ļą┬Ą─ąį─▄ųĖś╦Ż¼┐╔ūŅ┤¾╗»ī”╣╩šŽą┼╠¢Ą─ņ`├¶Č╚║═ī”▓╗┤_Č©ŠWĮjĢrčė╝░╬┤ų¬▌ö╚ļĄ─¶ö░¶ąįŻ╗╗∙ė┌Kalman×V▓©Ų„Ą─FDIĘĮĘ©Ż╗ŠWĮjĄ─ļSÖCĢrčė╩ŪNCSį┌ŠĆ╣╩šŽÖz£yĄ─ļy³cŻ¼╬─½IE66]═©▀^į┌NCSųą╝ė╚ļŠÅø_Ų„╩╣ļSÖCĢrčė▐Dūā×ķČ©ĢrčėŻ¼╚╗║¾įOėŗ¶ö░¶HĪŻĀŅæBė^£yŲ„▀Mąą╣╩šŽÖz£yŻ¼┼c─┐Ū░Ą─FDĘĮĘ©ŽÓ▒╚Ż¼įōĘĮĘ©─▄īŹ¼Fį┌ŠĆ╣╩šŽÖz£yŻ¼ŪęŠ▀ėą▌^╔┘ėŗ╦Ń┴┐Īó▌^ÅŖ¶ö░¶ąį╝░ī”╣╩šŽĄ─├¶ĖąąįŻ╗ī”ė┌ė╔ė┌öĄō■üG╩¦Č°ę²ŲĄ─öĄō■ą┼Žó▓╗┐╔£yå¢Ņ}Ż¼╬─½I╠ß│÷┴╦ĢrčėÜł▓Ņ«a╔·Ų„╝░ŲõķuųĄĄ─┬ō║ŽįOėŗĘĮĘ©Ż¼£p╔┘┴╦ę“×ķą┼ŽóüG╩¦Č°ę²ŲĄ─š`ł¾Ż╗ę“×ķT-S(Takagi—Sugeno)─Żą═▓╗ąĶꬊWĮjĢrčėĄ─Š½┤_ą┼ŽóŻ¼═¼Ģrėų─▄ĮŌøQą┼Žó░³Ą─üG╩¦Ż¼╦∙ęį╬─½Iæ¬ė├T-S─Żą═üĒ├Ķ╩÷Š▀ėą▓╗═¼ŠWĮjĢrčėĄ─NCS─Żą═Ż¼į┘└¹ė├Ą╚ārĘĮ│╠║═─Ż║²ė^£yŲ„ĘĮĘ©üĒ▀Mąą╣╩šŽÖz£yŻ¼įōĘĮĘ©Š▀ėą▌^Ė▀īŹė├ąį║═ėąą¦ąįĪŻ╗∙ė┌T-S─Żą═Ą─ā׳cŻ¼ė├ŲõüĒ├Ķ╩÷Ė³╝ėÅ═ļsĄ─NCS─Żą═▀MČ°▀Mąą╣╩šŽį\öÓ▀ĆąĶę¬Ė³╔Ņ╚ļĄ─蹊┐ĪŻ
5 FDDĄ─æ¬ė├│╔╣¹
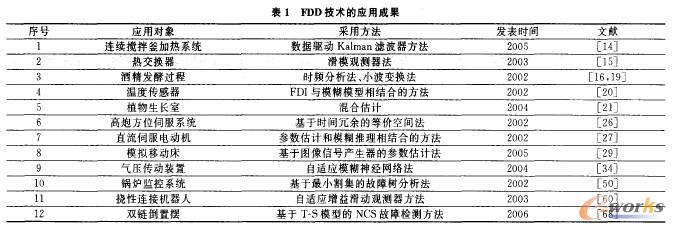
╣╩šŽÖz£y┼cį\öÓ╝╝ąg▓╗āHį┌└Ēšō╔Ž½@Ą├┴╦║▄ČÓą┬Ą─▀Mš╣Ż¼į┌æ¬ė├ŅIė“ę▓╚ĪĄ├┴╦▓╗╔┘蹊┐│╔╣¹ĪŻ▒Ē1Įo│÷FDD╝╝ągĄ─ę╗ą®Ąõą═æ¬ė├ĪŻ
6 ĮY╩°šZ
Å─Į³─Ļ░l▒ĒĄ─╬─½I┐┤│÷Ż¼FDDĘĮĘ©š²┌ģŽ“ė┌ŠC║Ž╗»ĪŻ░čČ©┴┐─Żą═ĘĮĘ©┼c╗∙ė┌Č©ąį─Żą═Īó░ļČ©ąį─Żą═Ą─ĘĮĘ©▀MąąėąÖC╚┌║ŽŻ¼īŹ¼Fā×ä▌╗źčaŻ¼ęč│╔×ķFDDĄ─ę╗éĆ蹊┐¤ß³cĪŻļm╚╗╗∙ė┌ĮŌ╬÷─Żą═ĘĮĘ©Ą─蹊┐╚į╝»ųąė┌ŠĆąįŽĄĮyŻ¼Ą½ī”ĘŪŠĆąįŽĄĮyFDDĄ─蹊┐ęčĄ├ĄĮųžęĢĪŻė╔ė┌▓╗┤_Č©ąįĄ─ė░ĒæŻ¼ī”¶ö░¶ąįå¢Ņ}Ą─蹊┐Ģ■įĮüĒįĮČÓŻ¼Č°ČÓ─┐ś╦╝s╩°Ą─¶ö░¶FDDĘĮĘ©īó│╔×ķą┬Ą─蹊┐ĘĮŽ“ĪŻ┴Ē═ŌŻ¼╗∙ė┌ČÓ─Żą═(MM)╣└ėŗĄ─į\öÓĘĮĘ©š²ę²Ų╚╦éāĄ─蹊┐┼d╚żŻ¼Ą½╚ń║╬įOėŗūŅāץ──Żą═╝»║═║Ž└ĒĄ─╣└ėŗŲ„Ą╚▀ĆąĶę¬Ė³╔Ņ╚ļĄ─蹊┐ĪŻ╗∙ė┌ą┼╠¢╠Ä└ĒĄ─ĘĮĘ©░lš╣▌^═Ļ╔ŲŻ¼īóąĪ▓©Ęų╬÷ę²╚ļ╣╩šŽį\öÓĪŻė┐¼F│÷┤¾┴┐Ą─æ¬ė├│╔╣¹Ż¼╚į╩ŪĮ±║¾čąŠ┐Ą─¤ß³cĪŻDelta╦ŃūėĘĮĘ©į┌Ė▀╦┘ą┼╠¢╠Ä└Ē║═┐žųŲĘĮ├µ▒╚ęŲ╬╗╦ŃūėĘĮĘ©Š▀ėą║▄┤¾Ą─ā×įĮąįŻ¼į┌╣╩šŽį\öÓųąę²╚ļDelta╦ŃūėŻ¼┐╔ęįīŹ¼Fį┌ŠĆīŹĢrÖz£yŻ¼Š▀ėąņ`├¶Č╚Ė▀Īóėŗ╦Ń┴┐ąĪĪó┐╣įļ┬Ģ─▄┴”ÅŖĄ╚ā׳cĪŻę“┤╦Ż¼Delta╦ŃūėĘĮĘ©į┌╣╩šŽį\öÓųąĄ─æ¬ė├ėą═¹│╔×ķFDDą┬Ą─蹊┐ĘĮŽ“ų«ę╗ĪŻ
╗∙ė┌ų¬ūRĄ─ĘĮĘ©ī”ė┌ĘŪŠĆąįŽĄĮy║═Å═ļsŽĄĮyŠ▀ėą▌^Ė▀Ą─æ¬ė├ārųĄŻ¼Ė³▀mė├ė┌īŹļHĄ─╣żśIčbų├ĪŻČ°ŪęŲõ“ųŪ─▄”╠žąįŻ¼Ę¹║Žī”ŽĄĮyĄ─ūį╚╗═Ų└ĒŻ¼╩Ūę╗ĘN║▄ėąŪ░═ŠĄ─ĘĮĘ©ĪŻ▀zé„╦ŃĘ©╩Ūę╗ĘNŽ╚▀MĄ─╚½Šųā×╗»╦ŃĘ©Ż¼īóŲõæ¬ė├ė┌FDDŅIė“Ż¼ėą┤²ė┌▀Mę╗▓Į蹊┐ĪŻ░čPetriŠWė├ĄĮ┐žųŲŽĄĮyĄ─╣╩šŽį\öÓŻ¼─▄ėąą¦īŹ¼Fį\öÓŽĄĮyĄ──Żą═╗»Ż¼ę▓╩Ūę╗ĘNą┬ĘĮĘ©Ż¼ųĄĄ├╔Ņ╚ļ蹊┐ĪŻČÓAgentĘĮĘ©─▄ĮŌøQę╗ą®é„Įy╚╦╣żųŪ─▄ĘĮĘ©¤oĘ©ĮŌøQĄ─┤¾ęÄ─ŻÅ═ļså¢Ņ}Ż¼Ųõį┌╣╩šŽį\öÓųąĄ─æ¬ė├Š▀ėąÅVķ¤Ą─░lš╣Ū░Š░ĪŻ╗∙ė┌NCSūį╔ĒĄ─╠ž³cŻ¼ī”Ųõ▀Mąą╣╩šŽÖz£y┼cį\öÓīó╩ŪFDD蹊┐Ą─ą┬ŅIė“ĪŻļm╚╗╣╩šŽÖz£y┼cį\öÓį┌└Ēšō╔Ž╚ĪĄ├┴╦įSČÓ═╗ŲŲ║═▀Mš╣Ż¼Ą½ė├ė┌īŹļH╣żśI▀^│╠Ą─▀Ć▓╗ČÓęŖŻ¼ę“┤╦Ż¼╠Į╦„▀m║ŽīŹļHæ¬ė├Ą─╣╩šŽÖz£y┼cį\öÓĘĮĘ©īó╩Ū┐Ų╝╝╚╦åT├µ┼RĄ─Š▀ėą╠¶æąįĄ─蹊┐šnŅ}ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║┐žųŲŽĄĮy╣╩šŽÖz£y┼cį\öÓ╝╝ągĄ─ūŅą┬▀Mš╣
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/support/11121510738.html






















