



ę²čį
é„ĮyĄ─öĄ┐žŽĄĮyČÓ▓╔ė├╗∙ė┌å╬╠Ä└ĒŲ„Ą─╝»ųą╩Į¾wŽĄĮYśŗŻ¼▀@ĘN¾wŽĄĮYśŗŽ“╔Ž▓╗─▄▀mæ¬ųŲįņŁhŠ│ī”öĄ┐žŽĄĮyĄ─Ęų╔ó╗»ę¬Ū¾Ż¼Ž“Ž┬ļyęįØMūŃĖ▀╦┘Ė▀Š½╝ė╣żī”ėŗ╦Ń─▄┴”║═öĄō■é„▌öĄ─ę¬Ū¾Ż¼ļyęį▀mæ¬╬┤üĒöĄ┐ž╝╝ągĄ─░lš╣ĪŻļSų°į┌╣żśI┐žųŲŅIė“Ą─æ¬ė├Ż¼¼Fł÷┐éŠĆęčĮø│╔×ķŽ┬ę╗┤·öĄ┐žŽĄĮyĖ„įOéõå╬į¬ų«ķgöĄō■Į╗ōQĄ─ų„ę¬├ĮĮķĪŻ
¼Fł÷┐éŠĆų«ė┌öĄ┐žŽĄĮyĄ─Ė„įOéõå╬į¬Ż¼╚ńĖ▀╦┘╣½┬Ęų«ė┌│Ū╩ąĮ╗═©Ż¼īÆĦų«ė┌┬ōŠWėŗ╦ŃÖCĪŻĖ▀╦┘Ė▀Š½Ą─öĄ┐ž╝ė╣żŻ¼ę¬Ū¾öĄ┐žå╬į¬įOéõų«ķgĄ─öĄō■Į╗ōQ├ĮĮķ─▄═Ļ│╔öĄō■Ą─Ė▀╦┘īŹĢré„▌öŻ¼Č°ŠWĮjé„▌ö╦┘Č╚ų▒Įėė░Ēæ┴╦╝ė╣żĄ─╦┘Č╚║═Š½Č╚Ż¼ę▓ė░Ēæ┴╦▀h│╠▓┘ū„Īó▀h│╠╣▄└ĒĪó▀h│╠į\öÓĄ─ą¦┬╩ĪŻ─┐Ū░Ż¼¼Fł÷┐éŠĆ╝╝ąg│²┴╦ų„ę¬ė├ė┌╣żśI¼Fł÷Ą─▀^│╠┐žųŲŻ¼ę▓ęčĮøė├ė┌öĄ┐žŽĄĮyĄ─įOéõ═©ą┼║══▀▀BĪŻĄ┬ć°SIEMENS╣½╦ŠĄ─SINUMERIK840DöĄ┐žŽĄĮyŠ═▓╔ė├r PROFIBUS┐éŠĆĄ─DPŽĄ┴ąŻ¼╚š▒ŠFANUC╣½╦ŠĄ─öĄ┐žŽĄĮyę▓▓╔ė├╗∙ė┌╣Ō└wĄ─īŻė├ā╚▓┐┐éŠĆSERCOS(serial realtime communication specification)ĪŻ▀Ćėąę╗ą®╬─½Iī”┐žųŲŲ„Šųė“ŠW(Controller Area NetworkŻ¼CAN)ĪóProfibus║═SERCOSĄ╚īŻė├¼Fł÷┐éŠĆį┌öĄ┐žŽĄĮy═©ą┼ĘĮ├µĄ─æ¬ė├ū÷┴╦蹊┐ĪŻ
ęį╠½ŠW╝╝ągļSų°InternetĄ─░lš╣Ą├ĄĮ┴╦’w╦┘░lš╣Ż¼Ųõé„▌ö╦┘┬╩ęčÅ─ūŅ│§Ą─10 Mbps░lš╣ĄĮ100MbpsŻ¼1000 MbpsŻ¼1 Gbps╔§ų┴10 GbpsŻ¼╩Ū─┐Ū░ė├ė┌╣żśI┐žųŲĄ─cANŻ¼PROFIBUSŻ¼WorldFIPĄ╚¼Fł÷┐éŠĆ¤oĘ©ŽÓ▒╚Ą─ĪŻ└Ēšō╔ŽŻ¼ęį╠½ŠWĄ─é„▌ö╦┘Č╚▒╚12 MbpsĄ─PROFIBUS I)PĪó2Ż«5 M║═5 MĄ─WorldFIPŻ¼ęį╝░1 MĄ─CAN┐ņĄ├ČÓŻ¼100 M┐ņ╦┘ęį╠½ŠWĄ─é„▌ö╦┘Č╚╩Ū12 MĄ─PROFIBUS—DPĄ─9▒ČĪó╩Ū5 MĄ─worldFIPĄ─20▒ČĪó╩Ū1 MĄ─CANĄ─100▒ČĪŻę“┤╦į┌╣żśI┐žųŲŅIė“Ż¼«ö╚╗ę▓░³║¼öĄ┐žŅIė“Ż¼ęį╠½ŠWīó’@╩Š│÷ŲõĖ▀ĦīÆĄ─Š▐┤¾ā×ä▌ĪŻ─┐Ū░Ż¼ć°ļHą┬ę╗┤·╗∙ė┌ęį╠½ŠWĄ─¼Fł÷┐éŠĆś╦£╩¾wŽĄäéäé╠ß│÷▓óš²į┌Į©┴óŻ¼ų„ę¬ėąEPAŻ¼EthernetŻ»IPŻ¼ModBus—IDAŻ¼PRoFINETŻ¼Ethernet PowerlinkŻ¼EtherCAŻ«TŻ¼SERCOS—IIIĄ╚ĪŻ▀@ą®čąŠ┐Å─æ¬ė├─Żą═ĮŪČ╚Ęų×ķ╗ņ║Ž─Żą═║══Ė├„─Żą═ā╔ŅÉĪŻ╗ņ║Ž─Żą═Ą─╦╝Žļ╩Ū╔Žīė▓╔ė├╔╠ė├ęį╠½ŠWŻ¼Ąūīė╚į▓╔ė├īŻė├¼Fł÷┐éŠĆĪó┤«┐┌Ą╚═©ą┼ĘĮ╩Į(╚ńEthernetŻ»IPŻ¼ModBusŻ»TCPĄ╚)ĪŻę╗ą®čąŠ┐╠ß│÷┴╦Ąūīė═©▀^RS232Ż¼╔Žīė═©▀^ęį╠½ŠWīóöĄ┐žŽĄĮyĮė╚ļInternetĄ─╗ņ║Ž─Żą═üĒĮŌøQöĄ┐žŽĄĮyĄ─öĄūų═©ą┼å¢Ņ}[5‘6]ĪŻ═Ė├„─Żą═╩Ū▓╔ė├ęį╠½ŠWīŹ¼F╦∙ėąīėĄ─═©ą┼(╚ńPROFINETŻ¼EPAĄ╚īŹĢręį╠½ŠWś╦£╩)ĪŻöĄ┐žŽĄĮy▓╔ė├ęį╠½ŠWīŹ¼F╦∙ėąīė═©ą┼Ą─ļy³cį┌ė┌öĄ┐žŽĄĮy▀\äė┐žųŲīėĄ─īŹĢr═©ą┼║═Š½┤_═¼▓Įå¢Ņ}ĪŻ
▒Š╬─蹊┐į┌¼Fėąęį╠½ŠW╝╝ąg╗∙ĄA╔ŽĄ─öĄ┐žŽĄĮy▀\äė┐žųŲīėīŹĢr═©ą┼║═Š½┤_═¼▓Į╝╝ągĪŻ
1 ęį╠½ŠWĄ─īŹĢrąį┼cĢrķg═¼▓Į╝╝ąg
1.1 ęį╠½ŠWĄ─īŹĢrąį
ęį╠½ŠWĄ─īŹĢrąįįu╣└ų„ę¬┐╝æ]╦³į┌é„▌öųąĄ─čė▀tĪŻį┌▀\äė┐žųŲīėŻ¼ī”═©ą┼īŹĢrąįĄ─ę¬Ū¾ų„ę¬╩Ūī”é„▌öčė▀t┤_Č©ąįĄ─ę¬Ū¾Ż¼╝┤é„▌öųąĄ─čė▀tĢrķg╩Ū┤_Č©Īó┐╔ŅAŽ╚ų¬Ą└Ą─Ż¼Č°▓╗╩ŪļSÖCĄ─ĪŻŽ┬├µų„ę¬Å─┤_Č©ąįĘĮ├µšf├„ęį╠½ŠWĄ─īŹĢrąįå¢Ņ}ĪŻ×ķĘĮ▒Ńšf├„Ż¼╠žČ©┴x╚ńŽ┬Ż║
tdelay×ķčė▀tĢrķgŻ¼ųĖ░l╦═╣سcš{ė├░l╦═╠Ä└Ēķ_╩╝ĄĮĮė╩š╣سcĄ─Įė╩š╠Ä└Ē═Ļ╚½╩šĄĮöĄō■ł¾╬─Ą─Ģrķgå¢Ė¶ ×ķöĄō■ļį┌═©ą┼╠Ä└ĒŲ„ųąĄ─Ą╚┤²ĢrķgŻ╗
×ķöĄō■ļį┌═©ą┼╠Ä└ĒŲ„ųąĄ─Ą╚┤²ĢrķgŻ╗ ×ķöĄō■ļĄ─░l╦═čė▀tŻ╗
×ķöĄō■ļĄ─░l╦═čė▀tŻ╗ ×ķöĄō■ļĄ─é„▓źčė▀tŻ╗
×ķöĄō■ļĄ─é„▓źčė▀tŻ╗ ×ķČ╦ŽĄĮy╠Ä└ĒĢrķgŻ¼ųĖöĄō■į┌░l╦═ĘĮ║═Įė╩šĘĮŽĄĮyųą▀MąąŠÅø_Īó┐ĮžÉĄ╚╠Ä└Ē╦∙║─┘MĄ─ĢrķgĪŻ
×ķČ╦ŽĄĮy╠Ä└ĒĢrķgŻ¼ųĖöĄō■į┌░l╦═ĘĮ║═Įė╩šĘĮŽĄĮyųą▀MąąŠÅø_Īó┐ĮžÉĄ╚╠Ä└Ē╦∙║─┘MĄ─ĢrķgĪŻ
═©│Żčė▀tĢrķgė├ęįŽ┬╣½╩Į▒Ē╩ŠŻ║
 (1)
(1)
╩ĮųąŻ║ ┼c
┼c ĪŻė╔ŠWĮjĦīÆ║═ą┼╠¢é„▓ź╦┘Č╚øQČ©Ż¼╩Ū┤_Č©ąįĄ─Ż╗
ĪŻė╔ŠWĮjĦīÆ║═ą┼╠¢é„▓ź╦┘Č╚øQČ©Ż¼╩Ū┤_Č©ąįĄ─Ż╗ ╩▄ŽĄĮy▄øė▓╝■ŁhŠ│ė░ĒæŻ¼«öŽĄĮyĄ─▄øė▓╝■ŁhŠ│┤_Č©ĢrŻ¼┐╔╩╣
╩▄ŽĄĮy▄øė▓╝■ŁhŠ│ė░ĒæŻ¼«öŽĄĮyĄ─▄øė▓╝■ŁhŠ│┤_Č©ĢrŻ¼┐╔╩╣ ┤_Č©ĪŻī”ė┌╣▓ŽĒ╩Įęį╠½ŠWŻ¼ė╔ė┌┤µį┌═©Ą└ĖéĀÄŻ¼öĄō■ļ░l╦═Ģ■«a╔·ø_═╗Ż¼Č°ļS║¾╦∙▓╔╚ĪĄ─ųž░lÖCųŲĢ■ī¦ų┬čė▀tĄ─▓╗┤_Č©ąį╔§ų┴░l╦═Ą─╩¦öĪŻ¼ę“┤╦
┤_Č©ĪŻī”ė┌╣▓ŽĒ╩Įęį╠½ŠWŻ¼ė╔ė┌┤µį┌═©Ą└ĖéĀÄŻ¼öĄō■ļ░l╦═Ģ■«a╔·ø_═╗Ż¼Č°ļS║¾╦∙▓╔╚ĪĄ─ųž░lÖCųŲĢ■ī¦ų┬čė▀tĄ─▓╗┤_Č©ąį╔§ų┴░l╦═Ą─╩¦öĪŻ¼ę“┤╦ ╩Ū▓╗┤_Č©Ą─Ż╗Ą½╚ń╣¹─▄ē“Ž▐ųŲŠW╔Ž┴„┴┐Ż¼▒▄├Ōø_═╗Š═┐╔ęį╩╣tĪŻ┤_Č©Ż¼īŹ¼F┤_Č©ąį═©ą┼ĪŻī”ė┌Į╗ōQ╩Įęį╠½ŠW
╩Ū▓╗┤_Č©Ą─Ż╗Ą½╚ń╣¹─▄ē“Ž▐ųŲŠW╔Ž┴„┴┐Ż¼▒▄├Ōø_═╗Š═┐╔ęį╩╣tĪŻ┤_Č©Ż¼īŹ¼F┤_Č©ąį═©ą┼ĪŻī”ė┌Į╗ōQ╩Įęį╠½ŠW │÷╩Ū┤_Č©Ą─Ż¼═©▀^ėŗ╦Ńé„▌öųąĮø▀^Ą─Ė„Į╗ōQÖCĄ─Į╗ōQÖCčė▀tų«║═┐╔ęįĄ├ĄĮ
│÷╩Ū┤_Č©Ą─Ż¼═©▀^ėŗ╦Ńé„▌öųąĮø▀^Ą─Ė„Į╗ōQÖCĄ─Į╗ōQÖCčė▀tų«║═┐╔ęįĄ├ĄĮ ×ķ▒ŻūCĮ╗ōQ╩Įęį╠½ŠWĄ─ĘĆČ©║═▓╗üG╩¦öĄō■ļŻ¼ąĶę¬ØMūŃā╔éĆŚl╝■Ż║
×ķ▒ŻūCĮ╗ōQ╩Įęį╠½ŠWĄ─ĘĆČ©║═▓╗üG╩¦öĄō■ļŻ¼ąĶę¬ØMūŃā╔éĆŚl╝■Ż║
(1)ŠWĮjé„▌ö┐é┴┐ąĪė┌Į╗ōQÖCĄ─╚▌┴┐Ż¼▒Ē╩Š×ķ
 (2)
(2)
╩ĮųąŻ║Capa×ķĮ╗ōQÖCĄ─╚▌┴┐Ż¼▒Ē╩Šę╗éĆå╬╬╗Ģrķgā╚─▄ē“╠Ä└ĒĄ─ļĄ─öĄ─┐Ż╗MsgŻ¼×ķĄ┌iéĆšŠ³c├┐å╬╬╗Ģrķg«a╔·Ą─ļĄ─öĄ─┐ĪŻ
(2)ę╗éĆšŠ³cĄ─Įė╩š─▄┴”┐╔ęį╠Ä└Ē╦∙ėąĄ─į┤╣سcĄĮįō╣سcĄ─öĄō■ļŻ¼▒Ē╩Š×ķ
 (3)
(3)
╩ĮųąŻ║Recv(j)╩ŪšŠ³cJĮė╩šöĄō■Ą──▄┴”Ż¼Msgt(j)╩Ūį┌å╬╬╗Ģrķgā╚Å─Ą┌išŠ³cĄĮĄ┌jšŠ³cé„▌ööĄō■Ą─┤¾ąĪĪŻ▀@ā╔éĆŚl╝■▒Ē├„Ż¼ų╗ę¬īóŠWĮj╔ŽĄ─┴„┴┐┐žųŲį┌Į╗ōQÖCĄ─╠Ä└Ē─▄┴”║═Įė╩š─▄┴”ų«ā╚Ż¼Š═─▄ū÷ĄĮĮ╗ōQ╩Įęį╠½ŠWĄ─ĘĆČ©▀\ąąĪŻī”ė┌ų▒═©╩ĮĮ╗ōQÖCŻ¼ę╗░ŃŪķørŽ┬Ż¼Į╗ōQÖCčė▀t┐╔ęį║÷┬įŻ╗ī”ė┌┤µā”▐D░l╩ĮĮ╗ōQÖCŻ¼Į╗ōQÖCčė▀t ×ķ┤µā”čė▀t
×ķ┤µā”čė▀t ┼c▐D░lčė▀t
┼c▐D░lčė▀t Ą─║═Ż║
Ą─║═Ż║
 (4)
(4)
▐D░lčė▀tėų┐╔ęį▒Ē╩Š×ķ
 (5)
(5)
╩ĮųąŻ║q×ķĻĀ┴ąųą┼┼į┌▒ŠöĄō■ļŪ░Ą─ļĄ─öĄ─┐Ż¼ ×ķļķgĖ¶mtĪŻ×ķĄ┌iéĆļĄ─░l╦═čė▀tĪŻė╔╔Ž┐╔ų¬Ż¼╣▓ŽĒ╩Įęį╠½ŠW═©▀^Ž▐ųŲęį╠½ŠW┴„┴┐Ż¼▒▄├Ōø_═╗Ż¼┐╔ęįīŹ¼FīŹĢr═©ą┼Ż╗Į╗ōQÖC╩Įęį╠½ŠW═©▀^ę╗Č©│╠Č╚ĄžŽ▐ųŲ┴„┴┐ę▓─▄īŹ¼Fęį╠½ŠWĄ─īŹĢr═©ą┼ĪŻ
×ķļķgĖ¶mtĪŻ×ķĄ┌iéĆļĄ─░l╦═čė▀tĪŻė╔╔Ž┐╔ų¬Ż¼╣▓ŽĒ╩Įęį╠½ŠW═©▀^Ž▐ųŲęį╠½ŠW┴„┴┐Ż¼▒▄├Ōø_═╗Ż¼┐╔ęįīŹ¼FīŹĢr═©ą┼Ż╗Į╗ōQÖC╩Įęį╠½ŠW═©▀^ę╗Č©│╠Č╚ĄžŽ▐ųŲ┴„┴┐ę▓─▄īŹ¼Fęį╠½ŠWĄ─īŹĢr═©ą┼ĪŻ
1.2 Ģrķg═¼▓Į╝╝ąg
▀\äė┐žųŲīėįOéõę¬▀MąąŠ½┤_═¼▓Į▓┘ū„Ż¼▒žĒÜėąć└Ė±Š½┤_Ą─ĢrńŖŻ¼ę“×ķ║▄ČÓ▓┘ū„╩Ūį┌ć└Ė±Ą─Ģrķg▒Ē“īäėŽ┬ģf═¼═Ļ│╔Ą─Ż¼Č°ĢrńŖĄ─Ģrķg┤_Č©ąį╩▄ųŲė┌ė▓╝■Š¦¾wš±╩ÄŲ„┘|┴┐║═▄ø╝■Ą─ŁhŠ│Ż¼║▄╚▌ęū╩▄£žČ╚║═Ųõ╦¹ę“╦žĄ─ė░ĒæĪŻį┌īŹļH▓┘ū„ųąŻ¼ČÓöĄĢrńŖ├┐╠ņĢ■«a╔·5 sĪ½15 SĄ─Ģrå¢Ų½▓ŅĪŻį┌ī”Ģrķg═¼▓Įę¬Ū¾Ė▀Ą─ł÷║ŽŻ¼ąĶę¬ī”ŽĄĮyĄ─ĢrńŖŲ½▓Ņ▀Mąą│Cš²ĪŻ─┐Ū░Ż¼ŠWĮj╔ŽĄ─Ģrķg═¼▓Į╝╝ągų„ę¬ėąŠWĮjĢrķgģfūh║═Š½┤_Ģrķgģfūhā╔ĘNĪŻŠWĮjĢrķgģfūhĄ─═¼▓ĮŠ½Č╚ę╗░Ńų╗─▄▀_ĄĮ0Ż«1 msŻ¼«öæ¬ė├ī”ĢrķgŠ½Č╚ę¬Ū¾▌^Ė▀ĢrŻ¼▓╗─▄▀_ĄĮę¬Ū¾ĪŻ×ķ┴╦īóęį╠½ŠWė├ė┌ūįäė╗»ŽĄĮyĄ─Ė▀Š½Č╚Ģrķg═¼▓ĮŻ¼ąĶę¬▓╔ė├╠ž╩ŌĄ─ĘĮ╩ĮüĒØMūŃæ¬ė├Ą─ĢrķgŠ½Č╚ę¬Ū¾ĪŻIEEE 1588ś╦£╩Ą─Š½┤_Ģrķgģfūh(Preci—sion Time ProtocolŻ¼PTP)Š═╩Ū╗∙ė┌ęį╠½ŠWĄ─Ė▀Š½Č╚Ģrķg═¼▓ĮĄ─ĮŌøQĘĮ░ĖĪŻ
IEEE 1588ėąā╔ĘNŅÉą═Ą─ĢrńŖŻ║ó┘ģó┐╝ĢrńŖį┤Ż¼ĘQ×ķų„ĢrńŖŻ╗ó┌┐═æ¶ĢrńŖŻ¼ĘQ×ķÅ─ĢrńŖĪŻÅ─└Ēšō╔ŽųvŻ¼╚╬║╬ĢrńŖČ╝┐╔ęį│õ«öų„ĢrńŖ║═Å─ĢrńŖĪŻÅ─ĢrńŖ║═ų„ĢrńŖ═©▀^Į╗ōQ═¼▓Įą┼ŽóüĒ═Ļ│╔Ģrķg═¼▓ĮŻ¼═¼▓Į▀^│╠Ęų×ķā╔éĆ▓Į¾E.
▓Į¾E1 Ų½▓Ņ£y┴┐║═Ų½▓Ņ│Cš²▀^│╠╚ńłD1╦∙╩ŠĪŻį┌įō▀^│╠ųąŻ¼ų„ĢrńŖ░┤╦∙Č©┴xĄ─ĢrķgķgĖ¶Ż¼ų▄Ų┌ąįĄžŽ“╦∙ėąÅ─ĢrńŖ░l╦══¼▓Įł¾╬─Ż¼═¼▓Įł¾╬─ųąöyĦįōł¾╬─░l╦═Ģr┐╠Ą─╣└ėŗųĄĪŻų„ĢrńŖėøõø═¼▓Įł¾╬─░l│÷Ą─Š½┤_Ģr┐╠TmŻ¼Ż¼Å─ĢrńŖėøõøĮė╩š═¼▓Įł¾╬─Ą─Š½┤_Ģr┐╠tĪŻĪŻų„ĢrńŖŠoĮėų°░l╦═ę╗éĆöyĦų°LĪŻĄ─Ė·ļSł¾╬─Ż¼į┌Įė╩šĄĮĖ·ļSł¾╬─║¾Ż¼Å─ĢrńŖėŗ╦ŃŲ½▓ŅųĄ
 (6)
(6)
▓óīóĢrńŖ│Cš²×ķ
 (7)
(7)
╚ń╣¹║÷┬įé„▌öŠĆ┬Ę╔ŽĄ─čė▀tDŻ¼ätÅ─ĢrńŖ║═ų„ĢrńŖ═¼▓ĮĪŻ
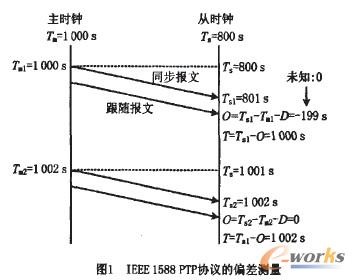
▓Į¾E2 čė▀t£y┴┐Ż¼ė├ė┌£y┴┐ų„ĢrńŖĄĮÅ─ĢrńŖĄ─é„▌öčė▀tŻ¼£y┴┐▀^│╠╚ńłD2╦∙╩ŠĪŻÅ─ĢrńŖŽ“ų„ĢrńŖ░l╦═ę╗éĆčė▀t£y┴┐šłŪ¾ł¾╬─Ż¼▓óėøõø░l╦═įōł¾╬─Ą─Š½┤_Ģr┐╠RŻ¼ų„ĢrńŖĮė╩šįōšłŪ¾ł¾╬─▓óėøõøĮė╩šĄĮĄ─Š½┤_Ģr┐╠╩ŽŻ¼╚╗║¾Ž“Å─ĢrńŖ░l╦═öyĦŻźĄ─čė▀t£y┴┐Ēææ¬ł¾╬─Ż¼Å─ĢrńŖ╩šĄĮįōĒææ¬ł¾╬─║¾Ż¼Ė∙ō■Ž┬├µ╣½╩Įėŗ╦Ńčė▀t
 (8)
(8)
čė▀t£y┴┐Ą─ĢrķgķgĖ¶┐╔ęį┤¾ė┌Ų½▓Ņ£y┴┐(─¼šJųĄ×ķ4 S'60 s)Ż¼ę▓┐╔ęį╩ŪĘŪų▄Ų┌ąįĄž▀MąąŻ¼▀@śėŠWĮjžō▌dĢ■£p▌pĪŻ╚ń╣¹čė▀tĢrķg▒╚▌^ĘĆČ©Ż¼ätčė▀t£y┴┐┐╔ęįŽĪ░l▀MąąĪŻ
IEEE 1588 PTPģfūhų«╦∙ęį─▄╠ßĖ▀Ģrķg═¼▓ĮŠ½Č╚Ż¼╩Ūę“×ķĖ·ļSł¾╬─īó═¼▓Įł¾╬─░l╦═Ą─Š½┤_Ģr┐╠░lĮoÅ─ĢrńŖė├üĒ▀MąąĢrńŖŲ½▓ŅĄ─ėŗ╦ŃŻ¼Č°Š½┤_Ģr┐╠╩ŪÅ─ė▓╝■īė½@Ą├Ą─Ż¼▒╚Å─æ¬ė├īė½@Ą├Ą─ĢrķgųĄĖ³£╩┤_ĪŻIEEE 1588Ą─ĢrńŖŠ½Č╚┐╔ęį▀_ĄĮ1sęįŽ┬ĪŻ
1.3 öĄ┐žŽĄĮy▀\äė┐žųŲīė╠žš„
ßśī”öĄ┐žŽĄĮy╠žš„Ż¼īóöĄ┐žŽĄĮy▀\äė┐žųŲīė╠žš„Üw╝{×ķŽ┬├µÄū³c(“╚²▓╗╚²ę¬”)Ż║
(1)įOéõų«ķgĄ─ŠÓļx▓╗ķLę“×ķöĄ┐žŽĄĮy▀\äė┐žųŲįOéõĘų▓╝╝»ųąŻ¼╦∙ęįįOéõų«ķgĄ─ŠÓļx▓╗ķLŻ¼ę╗░ŃąĪė┌50 mĪŻ
(2)╣سcöĄ▓╗ČÓę“×ķ▀\äė┐žųŲīėįOéõöĄėąŽ▐Ż¼╦∙ęįŠWĮjųąĄ─╣سcöĄ▒╚▌^╔┘Ż¼ę╗░ŃąĪė┌32ĪŻ
(3)öĄō■┴┐▓╗┤¾├┐éĆ┐žųŲŲ„║═ł╠ąąŲ„ų«ķgĮ╗ōQĄ─ėąą¦öĄō■▓╗┤¾Ż¼ę╗░ŃąĪė┌14 ByteĪŻ
(4)═©ą┼ų▄Ų┌ę¬Č╠═©ą┼ų▄Ų┌Ą─ķLČ╠ė░Ēæ▓Õčaų▄Ų┌Ą─ķLČ╠Ż¼ų▒Įėė░Ēæų°╝ė╣żĄ─Š½Č╚ĪŻ«ö▓ÕčaŠ½Č╚ę¬Ū¾ąĪė┌0Ż«1 ptmĢrŻ¼▓Õčaų▄Ų┌▒žĒÜąĪė┌1 msŻ¼═©ą┼ų▄Ų┌æ¬įōĖ³Č╠ĪŻę“┤╦Ż¼öĄ┐žŽĄĮy▀\äė┐žųŲīėūĘŪ¾═©ą┼ų▄Ų┌ĢrķgįĮČ╠įĮ║├ĪŻ
(5)ų▄Ų┌ę¬£╩═©ą┼ų▄Ų┌▓╗āHę¬Č╠Č°Ūęę¬┤_Č©Ż¼╔ŽŽ┬ČČäėꬹĪĪŻ
(6)ę¬ėąć└Ė±Š½┤_Ą─ĢrńŖŽĄĮy▒ŻūC═¼▓Į▓┘ū„öĄ┐žŽĄĮyĄ─▀\äė┐žųŲīėī┘ė┌Ęų▓╝╩Į┐žųŲŽĄĮyŻ¼ąĶę¬ć└Ė±Š½┤_Ą─ĢrńŖŽĄĮy▒ŻūCĖ„─ŻēKĄ─Š½┤_ģf═¼▓┘ū„ĪŻį┌┐╝æ]▀@ą®╠žš„Ą─╗∙ĄA╔ŽŻ¼▒Š╬─╠ß│÷┴╦╗∙ė┌ĢrķgŲ¼ø_═╗▒▄├Ō║═Š½┤_Ģrķg═¼▓ĮĄ─ā×╗»╦ŃĘ©ĪŻ
1.4 ĢrķgŲ¼ø_═╗▒▄├ŌīŹĢr═©ą┼║═Š½┤_Ģrķg═¼▓Į╦ŃĘ©╝░Ųõā×╗»
öĄ┐žŽĄĮy▀\äė┐žųŲīė¼Fł÷┐éŠĆæ¬ė├▒╚▌^│╔╣”Ą─╩ŪSERCOSŻ¼╦³╩Ūę╗ĘNė├ė┌öĄūų╦┼Ę■║═é„äėŽĄĮyĄ─¼Fł÷┐éŠĆĮė┐┌║═öĄō■Į╗ōQģfūhŻ¼─▄ē“īŹ¼F╣żśI┐žųŲėŗ╦ŃÖC┼cöĄūų╦┼Ę■ŽĄĮyĪóé„ĖąŲ„║═┐╔ŠÄ│╠┐žųŲŲ„IŻ»O┐┌ų«ķgĄ─īŹĢröĄō■═©ą┼Ż¼1995─Ļ▒╗┼·£╩×ķIECl491 SYSTEM—Interfaceć°ļHś╦£╩Ż¼į┌öĄ┐žÖCąĄįOéõųąĄ├ĄĮ┴╦ÅVĘ║æ¬ė├ĪŻSERCOSĮė┐┌ė╔ę╗éĆų„šŠ║═╚¶Ė╔éĆÅ─šŠĮM│╔Ż¼Ė„šŠų«ķg▓╔ė├╣Ō└|┬ōĮėŻ¼śŗ│╔Łhą╬ŠWŻ¼šŠķgĄ─ūŅ┤¾ŠÓļx×ķ80 m(╦▄┴Ž╣Ō└w)╗“240m(▓Ż┴¦╣Ō└w)Ż¼ūŅ┤¾Å─šŠöĄ×ķ254Ż¼öĄō■é„▌ö┬╩×ķ2MbitŻ»sĪ½16 MbitŻ»sĪŻĄ┌╚²┤·SERCOSĖ„šŠ³cų«ķg┐╔ęį▓╔ė├ļpĮgŠĆ▀BĮėŻ¼ų¦│ųęį╠½ŠWé„▌öŻ¼é„▌ö╦┘┬╩┐╔▀_100 MbitŻ»sĪŻSERCOSģfūhČ©┴x┴╦ų„šŠé„ĮoÅ─šŠĄ─═¼▓ĮļŖł¾ĪóÅ─šŠé„Įoų„šŠĄ─╦┼Ę■ļŖł¾║═ų„šŠé„ĮoÅ─šŠĄ─ų„šŠļŖł¾╚²ĘNŅÉą═öĄō■Ż¼▓óė├ĘųĢr╝╝ągīŹ¼FīŹĢr═©ą┼Ż¼ę╗éĆų▄Ų┌Ą─═©ą┼▓Į¾E░³└©╚²▓ĮŻ║
(1)ų„šŠŽ“╦∙ėąÅ─šŠ░l╦══¼▓ĮļŖł¾▒Ē╩Šę╗éĆ═©ą┼ų▄Ų┌Ą─ķ_╩╝ĪŻ
(2)Å─šŠę└┤╬į┌ūį╝║Ą─ĢrķgŲ¼ā╚Ž“ų„šŠ░l╦═╦┼Ę■ļŖł¾ĪŻ
(3)ų„šŠŽ“╦∙ėąÅ─šŠ░l╦═ų„šŠļŖł¾ĪŻ▒Š╬─ĮĶĶbSERCOSĘųĢr═©ą┼Ą─╦╝ŽļīŹ¼FīŹĢr═©ą┼Ż¼×ķģfš{öĄō■═©ą┼╠Ä└Ē║═Ģrķg═¼▓Į╠Ä└ĒŻ¼į┌SERCOS═©ą┼╦╝ŽļĄ─╗∙ĄA╔ŽŻ¼ū÷┴╦Ž┬├µÄū³cĖ─▀MŻ¼ęįīŹ¼FŠ½┤_Ģrķg═¼▓Į╣”─▄▓ó╠ßĖ▀═©ą┼ą¦┬╩Ż║
(1)īóų„šŠé„ĮoÅ─šŠĄ─ł¾╬─Ęų×ķ═¼▓Įł¾╬─║═Ė·ļSł¾╬─ā╔ŅÉĪŻ═¼▓Įł¾╬─▒Ē╩Šę╗éĆ═©ą┼ų▄Ų┌Ą─ķ_╩╝Ż¼▓óöyĦ▒ŠĄž░l╦═Ģrķg╣└╦ŃųĄŻ╗Ė·ļSł¾╬─ųąöyĦ▒ŠĄžŠ½┤_ĢrńŖęį╝░ų„šŠ░lĮoĖ„Å─šŠĄ─Ž┬ąąöĄō■ĪŻ
(2)īóų„šŠöĄō■ł¾╬─║═ė├ė┌Ģrķg═¼▓ĮĄ─Ė·ļSł¾╬─║ŽČ■×ķę╗Ż¼ĘQ×ķĖ·ļSł¾╬─Ż¼ęį╠ßĖ▀═©ą┼ą¦┬╩ĪŻ
(3)ę╗éĆ═©ą┼ų▄Ų┌░³└©═¼▓Įł¾╬─ĪóĖ·ļSł¾╬─ĪóÅ─šŠł¾╬─╚²▓┐ĘųŻ¼į┌īŹĢr═©ą┼ų▄Ų┌╗∙▒Š▓╗ūāĄ─╗∙ĄA╔Ž═Ļ│╔┴╦Š½┤_Ģrå¢═¼▓Į╣”─▄ĪŻĖ∙ō■öĄ┐žŽĄĮy▀\äė┐žųŲīė═©ą┼Ą─╠žš„Ż¼į┌įOėŗ╦ŃĘ©ųąĖ³ūóųž═©ą┼Ą─┤_Č©ąįŻ¼Č°▓╗╩ŪŠWĮjĮyėŗąį─▄Ą─╠ßĖ▀Ż╗▓╔ė├║åå╬Ą─ŠWĮj═žōõŻ¼▒M³ā£p╔┘é„▌öčė▀tŻ╗▓╔ė├╩š╝»║═Ęų░l▓óąą╠Ä└Ē╝╝ągŻ¼╠ßĖ▀ąĪöĄō■ēKĄ─é„▌öą¦┬╩Ż╗Š½║å╗“╠°▀^TCPŻ»IPŠWĮjģfūhŻ¼£p╔┘Č╦ŽĄĮy╠Ä└ĒĢrķgĪĻĪŻĪŻŻ╗į┌│§╩╝╗»ļAČ╬▀MąąŠ½┤_Ģrķgģfūhčė▀tĄ─£y┴┐Ż¼▒▄├Ō═©ą┼▀^│╠ųąū÷čė▀t£y┴┐╠Ä└ĒŻ╗×ķ▒▄├Ō▀^ė┌ŅlĘ▒ū÷ĢrńŖ│Cš²Ż¼į┌╦ŃĘ©ųąįOČ©Ų½▓ŅķōųĄŻ¼ų╗ėąŲ½▓Ņ│¼▀^įōķōųĄĢr▓┼ū÷│Cš²Ż╗īóīŹĢr═©ą┼┼cĢrķg═¼▓Į╠Ä└ĒėąÖCĮY║Žį┌ę╗Ųęį╠ßĖ▀ą¦┬╩ĪŻā×╗»╦ŃĘ©╚ńŽ┬Ż║
▓Į¾E1│§╩╝╗»╠Ä└ĒŻ¼£y┴┐ŠWĮjčė▀tDĪŻ
▓Į¾E2ķ_╩╝ę╗éĆ═©ą┼ų▄Ų┌Ż¼ų„šŠŽ“╦∙ėąÅ─šŠ░l╦══¼▓Įł¾╬─SyncŻ«
▓Į¾E3ų„šŠīóįōSyncł¾╬─░lĄĮŠĆ┬Ę╔ŽĢrŻ¼╚Ī▒ŠĄžŠ½┤_Ģr┐╠LĪŻĪŻ
▓Į¾E4Ė„Å─šŠĮė╩šĄĮįōSyncł¾╬─ĢrŻ¼ėøõø▒ŠĄžŠ½┤_Ģr┐╠T5ĪŻĪŻ
▓Į¾E5ų„šŠŽ“╦∙ėąÅ─šŠ░l╦═Ė·ļSł¾╬─Ż¼░³└©▒ŠĄžŠ½┤_ĢrńŖLŻ¼║═ų„šŠ░lĮoĖ„Å─šŠĄ─Ž┬ąąöĄō■ĪŻ
▓Į¾E6Ė„Å─šŠĮė╩šĄĮL-║¾Ż¼ėŗ╦ŃĢrńŖŲ½▓Ņ0=
▓Į¾E7Ė„Å─šŠ┼ąöÓĪŻ╩Ūʱ│¼▀^ķōųĄŻ¼╚ń╣¹│¼▀^Ż¼ätš{š¹▒ŠĄžĢrńŖŻ¼Ę±ät▓╗š{š¹ĪŻ
▓Į¾E8Ė„Å─šŠÅ─Ė·ļSł¾╬─ųą╚Ī│÷Ęų░lĮoūį╝║Ą─öĄō■ĪŻ
▓Į¾E9Ė„Å─šŠę└┤╬Ž“ų„šŠ░l╦═Å─šŠł¾╬─ĪŻ
▓Į¾ElO▀M╚ļŽ┬ę╗éĆ═©ą┼ų▄Ų┌Ż¼▐D▓Į¾E2ĪŻ
2 īŹĢr═©ą┼║═Ģrķg═¼▓ĮĄ─īŹ¼F
2.1 ŠWĮjĮYśŗ
ŽĄĮy═©▀^ęį╠½ŠWīó┐žųŲŲ„Īó╦┼Ę■“īäėŲ„Īóų„▌S“īäėŲ„Ą╚▀BĮėŲüĒŻ¼▀ē▌ŗ╔Ž▓╔ė├ų„Å─╩ĮĮYśŗĪŻ┐žųŲŲ„ĘQ×ķų„šŠŻ¼╦┼Ę■“īäėŲ„Īóų„▌S“īäėŲ„Ą╚ĘQ×ķÅ─šŠĪŻ×ķ▒▄├Ōė╔ė┌ŠWĮjųąå¢╣سc╦∙ĦüĒĄ─čė▀tŻ¼▒M┴┐╩╣ė├┐éŠĆą═╗“ąŪą═Ą╚║åå╬Ą─ŠWĮjĮYśŗŻ¼▓ó▒M┴┐▀xō±┤µā”▐D░lčė▀t×ķ┴Ń╗“▌^ąĪĄ─▀BĮėįOéõĪŻ
2.2 ł¾╬─Ė±╩Į
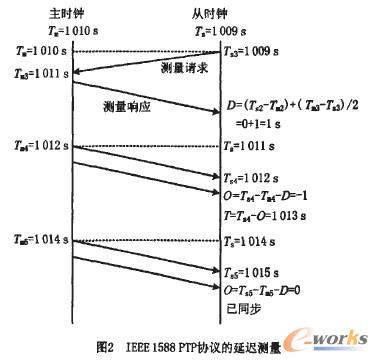
═©ą┼ųąé„▌öĄ─ł¾╬─░³└©ų„šŠł¾╬─║═Å─šŠł¾╬─ĪŻų„šŠł¾╬─╩Ūų„šŠ░lŽ“Å─šŠĄ─ł¾╬─Ż¼ŲõųąöyĦėą═¼▓Įą┼╠¢ĪóųĖ┴Ņ║═ģóöĄĪŻų„šŠł¾╬─░³└©Ė·ļSł¾╬─║══¼▓Įł¾╬─ā╔ĘNĪŻĖ·ļSł¾╬─Ą─Ė±╩Į╚ńłD3a╦∙╩ŠŻ¼ł¾╬─Ņ^(14 byte)░³└©į┤šŠ³cĄ─ęį╠½ŠWĮķ┘|įLå¢┐žųŲ(Media Access ControlŻ¼MAC)ĄžųĘĪó─┐ś╦šŠ³cĄ─ęį╠½ŠWMACĄžųĘ║═ģfūhŅÉą═Ż╗ł¾╬─╬▓╩Ūę╗éĆ4 byteĄ─裣h╚▀ėÓąŻ“×┤aŻ¼ė├ė┌öĄō■ąŻ“ׯ╗öĄō■ģ^░³║¼ł¾╬─ŅÉĪóĢrķgė“║═ėąą¦öĄō■ė“ĪŻł¾╬─ŅÉė├ė┌ģ^äe═¼▓Įł¾╬─║═Ė·ļSł¾╬─Ż¼Ģrķgė“┤µĘ┼ī”ĢröĄō■Ż╗öĄō■ė“░³└©ų„šŠĘų░lĮoĖ„Å─šŠĄ─ĮM║ŽöĄō■Ż¼ī”æ¬├┐éĆÅ─šŠėąę╗éĆöĄō■ēKŻ¼├┐éĆöĄō■ēKųą░³└©Įė╩šöĄō■Ą─Å─šŠĄ─▀ē▌ŗĄžųĘĪóų„šŠ░lĮoÅ─šŠĄ─┐žųŲūųŻ¼ęį╝░ĘŪų▄Ų┌öĄō■║═ų▄Ų┌öĄō■ĪŻÅ─šŠĄ─▀ē▌ŗĄžųĘī”Å─šŠĄ─ŠÄ╠¢Ż¼ė├įōŠÄ╠¢┤·╠µMACĄžųĘüĒģ^ĘųŽĄĮyųąĄ─╦∙ėąÅ─šŠŻ╗┐žųŲūų╩Ūų„šŠ░lĮoÅ─šŠĄ─┐žųŲųĖ┴ŅĄ─ŠÄ╠¢Ż╗ĘŪų▄Ų┌öĄō■ųąöyĦ═©ą┼▀^│╠ųąų„šŠé„ĮoÅ─šŠĄ─ĘŪų▄Ų┌ą┼ŽóŻ¼╚ńģóöĄĄ╚Ż╗ų▄Ų┌öĄō■ųąöyĦ═©ą┼▀^│╠ųąų„šŠé„ĮoÅ─šŠĄ─ų▄Ų┌öĄō■Ż¼╚ń╬╗ų├Īó╦┘Č╚Ą╚ĪŻ═¼▓Įł¾╬─║═Ė·ļSł¾╬─Ė±╩Į╗∙▒Šę╗śėŻ¼╬©ę╗Ą─ģ^äe╩Ū═¼▓Įł¾╬─ųąø]ėąöĄō■ė“ĪŻ
Å─šŠł¾╬─╩ŪÅ─šŠé„Įoų„šŠĄ─╔Žąął¾╬─Ż¼ł¾╬─Ė±╩Į╚ńłD3b╦∙╩ŠĪŻł¾╬─Ņ^║═ł¾╬─╬▓┼cĖ·ļSł¾╬─ŽÓ═¼Ż╗öĄō■ģ^░³└©Å─šŠ▀ē▌ŗĄžųĘĪóĀŅæBūųĪóĘŪų▄Ų┌öĄō■║═ų▄Ų┌öĄō■ĪŻĀŅæBūų╩ŪÅ─šŠé„Įoų„šŠĘ┤üą┼ŽóĄ─ŠÄ╠¢Ų┌öĄō■ųąöyĦĘŪų▄Ų┌ą┼ŽóŻ¼╚ńŽĄĮył¾Š»Ą╚Ż╗ų▄Ų┌öĄō■ųąöyĦų▄Ų┌ą┼ŽóŻ¼╚ńīŹļH╬╗ų├Īó╦┘Č╚Ą╚ĪŻł¾╬─ųąČ©┴xĄ─ĘŪų▄Ų┌öĄō■Īóų▄Ų┌öĄō■ķLČ╚┐╔ęį┼õų├Ż¼Ųõ╦¹ė“Ą─ķLČ╚┐╔ęįįOų├×ķ│Ż┴┐ĪŻ
2.3 ĢrķgŲ¼┼õų├▓▀┬į
ę¬▒ŻūC╦ŃĘ©Ą─ĘĆČ©ąįŻ¼ąĶę¬čąŠ┐╦ŃĘ©Ą─ĢrķgŲ¼┼õų├▓▀┬įĪŻ╝┘įOŽĄĮyųąėą1éĆų„šŠŻ¼ųõéĆÅ─šŠŻ¼r╩Ū═¼▓Įł¾╬─Ą─é„▌öĢrķgŻ¼m╩ŪĖ·ļSł¾╬─Ą─é„▌öĢrķgŻ¼s╩ŪÅ─šŠł¾╬─Ą─é„▌öĢrķgĪŻ╩Ūų▄Ų┌öĄō■╣سcĄ─▓╔śėų▄Ų┌(ę▓×ķ═©ą┼ų▄Ų┌)Ż¼Čó╩Ū├┐éĆ╣سcĄ─Ę■äšķ_õN(░³└©Ę■äš╠Ä└ĒĢrķgĄ╚)ĪŻät═©ą┼Ą─ĘĆČ©ąįŚl╝■×ķ
 (9)
(9)
▀Mę╗▓Į┐╝æ]Ė·ļSł¾╬─ųą░³║¼é„ĮoĖ„Å─šŠĄ─ą┼ŽóŻ¼ätĖ·ļSł¾╬─Ą─é„▌öĢrķg╚ĪøQė┌Ęų┼õĮo├┐éĆÅ─šŠĄ─é„▌öĢrķgĪóÅ─šŠéĆöĄĪół¾╬─ŅÉķLĪóĢrķgė“ķL║═ł¾Ņ^ł¾╬▓Ą─ķLĪŻ╝┘įOĘų┼õĮo├┐éĆÅ─šŠĄ─öĄō■ēKé„▌öĢrķgķLČ╚×ķbŻ¼ł¾╬─ŅÉĢrķL“Ż¼Ģrķgė“ĢrķLuŻ¼ł¾╬─Ņ^ĢrķLhŻ¼ł¾╬─╬▓ĢrķLPŻ¼ätėą
 (10)
(10)
ėųįOÅ─šŠĄžųĘĢrķLOĪŻĪó┐žųŲūųĢrķLOĪŻĪóĘŪų▄Ų┌öĄō■ĢrķLa║═ų▄Ų┌öĄō■ĢrķLcŻ¼ätėą
 (11)
(11)
īó╩Į(11)┤·╚ļ╩Į(10)Ż¼
Ą├ (12)
(12)
įOÅ─šŠł¾╬─ųąĄ─ĄžųĘĢrķLOŻ¼ĪóĀŅæBūųĢrķLOĪŻĪóĘŪų▄Ų┌öĄō■ĢrķLd║═ų▄Ų┌öĄō■ĢrķLPŻ¼ėą
 (13)
(13)
īó╩Į(12)║═╩Į(13)┤·╚ļ╩Į(9)Ż¼Ą├
 (14)
(14)
įO ×ķ│Ż┴┐Ż¼▓ó╝┘įO├┐éĆ╣سcĄ─Ę■äšķ_õNČó╩Ū│Ż┴┐Ż¼═¼▓Įł¾╬─░┤ęį╠½ŠWūŅąĪł¾╬─╠Ä└ĒŻ¼ätrę▓┐╔┐┤│╔│Ż┴┐Ż¼▀@śė╩Į(14)┐╔ęį╗»║å×ķ
×ķ│Ż┴┐Ż¼▓ó╝┘įO├┐éĆ╣سcĄ─Ę■äšķ_õNČó╩Ū│Ż┴┐Ż¼═¼▓Įł¾╬─░┤ęį╠½ŠWūŅąĪł¾╬─╠Ä└ĒŻ¼ätrę▓┐╔┐┤│╔│Ż┴┐Ż¼▀@śė╩Į(14)┐╔ęį╗»║å×ķ
╩Į(15)Š═╩Ū═©ą┼ų▄Ų┌Ą─ĘĆČ©ąįŚl╝■ĪŻ┼õų├║Ž▀mĄ─ PiØMūŃ╩Į(15)Ą─Śl╝■Š═┐╔ęį▒ŻūC═©ą┼Ą─ĘĆČ©ąįĪŻį┌öĄ┐žŽĄĮyæ¬ė├ųąŻ¼├┐éĆÅ─šŠé„▌öĄ─öĄō■Ė±╩Į═∙═∙╩Ūę╗śėĄ─Ż¼▀@śė╩Į(15)┐╔ęį▀Mę╗▓Į╗»║å×ķ
PiØMūŃ╩Į(15)Ą─Śl╝■Š═┐╔ęį▒ŻūC═©ą┼Ą─ĘĆČ©ąįĪŻį┌öĄ┐žŽĄĮyæ¬ė├ųąŻ¼├┐éĆÅ─šŠé„▌öĄ─öĄō■Ė±╩Į═∙═∙╩Ūę╗śėĄ─Ż¼▀@śė╩Į(15)┐╔ęį▀Mę╗▓Į╗»║å×ķ
 (16)
(16)
2.4 ═©ą┼▀^│╠
═©ą┼▀^│╠Ęų×ķ╬ÕéĆļAČ╬Ż║
(1)ģóöĄ╔·│╔ļAČ╬ų„šŠ£y┴┐═¼▓Įł¾╬─ĪóĖ·ļSł¾╬─ĪóÅ─šŠł¾╬─Ą─ĢrķgŲ¼ķLČ╚║═ŠWĮjčė▀tĢrķgŻ¼▓óėøõøĖ„šŠ³cĄ─MACĄžųĘ║═×ķĖ„šŠ³cĘų┼õĄ─▀ē▌ŗĄžųĘĪŻų„šŠ═©▀^Ž“Ė„Å─šŠ░l╦═ł¾╬─Ż¼▓óĮė╩šÅ─šŠĒææ¬ł¾╬─Ą─ĘĮ╩Į£y┴┐═∙ĘĄčė▀tŻ¼ė├“═∙ĘĄčė▀tŻ»2”╣└╦ŃŠWĮjčė▀t║═ĢrķgŲ¼ĪŻų„šŠīó▀@ą®ą┼Žóīæ╚ļ┼õų├▒ĒŻ¼▓óĖ∙ō■▀@ą®ą┼Žó╔·│╔┼õų├▒ĒųąĖ„ł¾╬─Ą─░l╦═ĢrķgģóöĄŻ¼╩Į(17)×ķėŗ╦ŃĘĮĘ©Ż¼ŲõųąJ×ķł¾╬─ŠÄ╠¢Ż¼Å─1ķ_╩╝░┤═¼▓Įł¾╬─ĪóĖ·ļSł¾╬─ĪóÅ─šŠ1ĪóÅ─šŠ2Ą─┤╬ą“ŠÄŽ┬╚źĪŻStart(j)×ķĄ┌éĆł¾╬─Ą─░l╦═Ģr┐╠ĪŻ├┐éĆł¾╬─Ą─░l╦═Ģr┐╠×ķŲõŪ░├µ╦∙ėął¾╬─╦∙š╝ĢrķgŲ¼SlotŻ¼Ą─║═ĪŻ╚¶įōļAČ╬▀\ąąš²┤_Ż¼ät▀M╚ļļAČ╬(2)Ż¼Ę±ätł¾ÕeĪŻ
 (17)
(17)
(2)│§╩╝Ģrķg═¼▓ĮļAČ╬░┤1Ż«2╣ØĮķĮBĄ─╦ŃĘ©▀MąąĢrķgŲ½▓Ņ£y┴┐┼c│Cš²ĪŻ╚¶įōļAČ╬▀\ąąš²┤_Ż¼ät▀M╚ļļAČ╬(3)Ż¼Ę±ätł¾ÕeĪŻ
(3)ģóöĄĘų░lļAČ╬ų„šŠŽ“╦∙ėąÅ─šŠÅV▓ź░l╦═┼õų├▒Ēą┼ŽóŻ¼Ė„Å─šŠĮėĄĮ┼õų├▒Ēą┼Žó║¾Ż¼į┌Ęų┼õĮo╦³Ą─ĢrķgŲ¼ā╚Ž“ų„šŠ░l╦═Ēææ¬ł¾╬─ĪŻų„šŠÖz▓ķ╩Ūʱ╦∙ėąÅ─šŠĄ─Ēææ¬ł¾╬─Č╝▒╗Įė╩šŻ¼╚ń╣¹Č╝▒╗Įė╩šŻ¼ät▀M╚ļļAČ╬(4)Ż¼Ę±ätł¾ÕeĪŻ
(4)įć▀\ąąļAČ╬ų„šŠį┌┼õų├Ą─ĢrķgŲ¼ā╚░l╦══¼▓Įł¾╬─║═Ė·ļSł¾╬─Ż¼Å─šŠį┌Ęų┼õĄ─ĢrķgŲ¼ā╚Ž“ų„šŠ░l╦═æ¬┤ł¾╬─ĪŻų„šŠĖ∙ō■┼õų├▒Ē┼cÅ─šŠĄ─Ēææ¬ĢrķgüĒ┼ąöÓÅ─šŠĄ─ģóöĄ┼õų├╩Ūʱ║Ž▀mĪŻ╚¶▓╗║Ž▀mätĘĄ╗žļAČ╬(1)Ż¼š{š¹ģóöĄŻ╗╚¶║Ž▀mŻ¼ät▀M╚ļļAČ╬(5)ĪŻ
(5)š²│Ż▀\ąąļAČ╬į┌┤╦ļAČ╬ų▄Ų┌▀\ąą1Ż«4╣Ø╦∙ĮķĮB╦ŃĘ©Ą─▓Į¾E2Ī½▓Į¾E9ĪŻ
3 īŹĢr═©ą┼┼cĢrķg═¼▓ĮĄ─īŹ“×┼cĘų╬÷
3.1 īŹĢrąįįuār
×ķ▒Ńė┌šf├„Ż¼Č©┴xūā┴┐Ż║‰×ķĖ·ļSł¾╬─Ęų┼õĮo├┐éĆÅ─šŠöĄō■ēKųąĘŪų▄Ų┌öĄō■║═ų▄Ų┌öĄō■ķLČ╚Ą─║═Ż╗l÷ł×ķÅ─šŠł¾╬─ųąĘŪų▄Ų┌öĄō■║═ų▄Ų┌öĄō■ķLČ╚Ą─║═ĪŻ
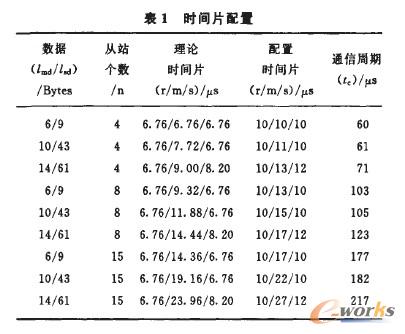
×ķ£p╔┘tĪŻŻ¼ĪŻ╗“Ę■äšķ_õN6rŻ¼īŹ“×ųą▓╔ė├┼į┬ĘTCPŻ»IPŻ¼ų▒Įėį┌ęį╠½ŠWŠWĮjĮė┐┌┐©(Network Inter—face CardŻ¼NIC)╔Ž░l╦═║═Įė╩šöĄō■Ą─ĘĮ╩ĮüĒ£p╔┘▀@ĘĮ├µĄ─čė▀tĪŻ▒Ē1╦∙╩Š×ķīŹ“×ųą▓╔ė├Ą─Š┼ĘNł÷Š░Ż¼ęį╝░ĢrķgŲ¼Ą─└Ēšōėŗ╦Ń║═īŹļH┼õų├ųĄĄ─▒╚▌^Ż¼└Ēšōėŗ╦ŃĘĮĘ©ģóęŖ2Ż«3╣ØĪŻ×ķ║å╗»ėŗ╦ŃŻ¼ĢrķLę╗öĄō■ķLČ╚Ż»ŠWĮjĦīÆŻ¼Ä¦īÆ▓╔ė├100 MbpsŻ¼Ģrķgė“ķL4ByteŻ¼ł¾╬─ŅÉė“ķL2 ByteŻ¼┐žųŲūųĪóĀŅæBūų2 ByteŻ¼▀ē▌ŗĄžųĘ1 ByteŻ¼Ę■äšķ_õN║÷┬įĪŻÅ─▒Ē1ųą┐╔ęį┐┤│÷Ż¼į┌4éĆÅ─šŠĄ─ŪķørŽ┬Ż¼é„▌ö6 ByteŻ»9 ByteĄ─‰Ż»ZsdöĄō■Ż¼═©ą┼ų▄Ų┌┐╔ęį┼õų├×ķ60“sŻ╗į┌15éĆÅ─šŠĄ─ŪķørŽ┬Ż¼é„▌ö14 ByteŻ»61 ByteĄ─lmdŻ»15döĄō■Ż¼═©ą┼ų▄Ų┌┐╔ęį┼õų├×ķ217“sĪŻĘų╬÷▒Ē1ųąöĄō■┐╔ęį┐┤│÷Ż¼ĢrķgŲ¼Ą─īŹļH┼õų├ųĄ▒╚└Ēšōėŗ╦ŃųĄ╔į┤¾┴╦ą®Ż¼įŁę“×ķŻ║ó┘└Ēšōėŗ╦Ńųą║÷┬į┴╦Ę■äšķ_õN║═Č╦ŽĄĮy╠Ä└ĒĢrķgŻ╗ó┌╚¶ę¬┐╝æ]ųžé„Ą╚┐╔┐┐ąį╠Ä└ĒŻ¼▀ĆąĶīó═©ą┼ų▄Ų┌┼õų├Ą├Ė³┤¾ę╗ą®Ż¼┴¶┐šŽČė├ė┌ųžé„╠Ä└ĒĪŻ
3.2 ═¼▓ĮŠ½Č╚įuār
×ķįuārĢrķg═¼▓ĮŠ½Č╚Ż¼į┌Å─ĢrńŖ╣سc║═ų„ĢrńŖ╣سcų«ķg▓╔ė├░³Į╗ōQĄ─ĘĮ╩Į£y┴┐Ģrķgš`▓ŅĪŻį┌ŠWĮjųą▀xō±ę╗éĆ╣سcū÷£yįć╣سcŻ¼£yįć▓Į¾E╚ńŽ┬Ż║
▓Į¾E1 ų„ĢrńŖ╣سc═©ų¬£yįć╣سcķ_╩╝ę╗┤╬£y┴┐ĪŻ
▓Į¾E2£yįć╣سcŽ“ų„ĢrńŖ╣سc║═╦∙ėąÅ─ĢrńŖ╣سcÅV▓ź░l╦═ę╗éĆ£yįćł¾╬─Ż¼▓óėøõø£yįćł¾╬─Ą─░l╦═Ģr┐╠ČĪĪŻ
▓Į¾E3 ų„ĢrńŖ╣سcĮė╩šĄĮ£yįćł¾╬─▓óėøõøŽ┬Įė╩šĢr┐╠LŻ¼īóĦėątĄ─Ēææ¬ł¾╬─░l╗žĮo£yįć╣سcĪŻ
▓Į¾E4 ═¼ĢrŻ¼├┐éĆÅ─ĢrńŖ╣سcĮė╩šĄĮ£yįćł¾╬─Ż¼▓óėøõøŽ┬Įė╩šĢr┐╠TĪŻĪŻ
▓Į¾E5├┐éĆÅ─ĢrńŖ╣سcīóĦėąTcĄ─Ēææ¬ł¾╬─░l╗žĮo£yįć╣سcĪŻ
▓Į¾E6£yįć╣سc×ķ├┐éĆÅ─ĢrńŖ╣سcėŗ╦ŃĢrķgš`▓Ņ
 (18)
(18)
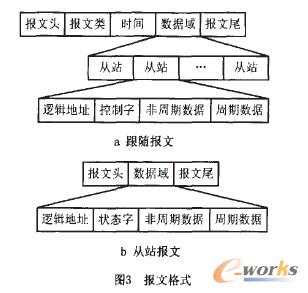
Ė∙ō■įō£yįćĘĮĘ©įOėŗ┴╦£yįćīŹ“×ĪŻ×ķ┴╦▀\ąąš`▓Ņ£y┴┐│╠ą“Ż¼īó═©ą┼ų▄Ų┌čėķL×ķš²│Ż▓┐Ęų║═£y┴┐▓┐ĘųĪŻš²│Ż▓┐Ęų═Ļ│╔═¼▓Į┼cīŹĢr═©ą┼Ż¼£y┴┐▓┐Ęų═Ļ│╔š`▓Ņ£y┴┐ĪŻ×ķ£p╔┘£y┴┐▀^│╠ųątĪŻĪŻĢrķg▓╗┤_Č©ąį╦∙ĦüĒĄ─š`▓ŅŻ¼▓╔ė├ĮėĮ³ė▓╝■īėĄ─╠Ä└ĒĘĮĘ©ĪŻ═©▀^ī”┤¾┴┐š`▓Ņśė▒ŠĄ─ĮyėŗĘų╬÷Ż¼š`▓ŅŲĮŠ∙ųĄ×ķ6║ļsĪŻūŅ┤¾ųĄ▓╗│¼▀^10║ļsĪŻłD4╦∙╩Š×ķ£y┴┐╦∙Ą├š`▓ŅĄ─Ęų▓╝ŪķørĪŻ
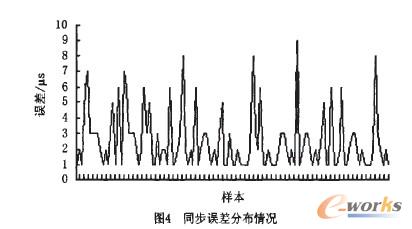
Ęų╬÷Ģrķg═¼▓Įš`▓Ņ«a╔·Ą─įŁę“Ż║ó┘▓╔ė├═∙ĘĄčė▀tĄ─ę╗░ļüĒ╣└╦Ńų„ĢrńŖĄĮÅ─ĢrńŖĄ─å╬Ž“čė▀tŻ¼Č°╦ŃĘ©ųą▓╔ė├å╬Ž“čė▀tėŗ╦ŃŲ½▓ŅųĄŻ¼▀@Ģ■ĦüĒę╗Č©Ą─š`▓ŅŻ╗ó┌═©ą┼▀^│╠ųąĄ─čė▀t┤µį┌äėæBČČäėŻ¼Ģ■ė░Ēæ╦ŃĘ©Ą─Š½Č╚Ż¼Å─ȰĦüĒę╗▓┐Ęųš`▓ŅĪŻ
4 ░▓╚½ąįĪó┐╔┐┐ąįĘų╬÷
4.1 ░▓╚½ąįĘų╬÷
ęį╠½ŠWī”öĄ┐ž═©ą┼Ą─░▓╚½═■├{ų„ę¬▒Ē¼Fį┌é„▌ö▀^│╠ųąöĄō■▒╗Įž½@╗“ūx╚ĪĪó║┌┐═▀B╚ļ═©ą┼▓ó═Ą┬Ā╗“╩╣ė├öĄō■Īó▀Mąą┐╔ė├ąį╣źō¶╗“▓ĪČŠ╣źō¶ĪŻęį╠½ŠWė├ė┌öĄ┐ž▀\äė┐žųŲīė═©ą┼╩Ū├µŽ“┐žųŲĄ─Ż¼×ķ▒ŻūCŲõ▓╗▒╗═Ō▓┐▓ĪČŠĄ╚Ė╔ö_Ż¼į┌╬’└Ē╔Ž▓╗┼c═Ō▓┐ŠWĮjŽÓ┬ōŻ¼Č°═©▀^┴Ē═ŌĄ─ŠWĮjĮė┐┌Įė╚╦═Ō▓┐ŠWĪŻ
4.2 ┐╔┐┐ąįĘų╬÷
ī”ė┌öĄ┐žŽĄĮy▀\äė┐žųŲīė═©ą┼üĒšfŻ¼▓╗─▄į╩įS╚╬║╬╣سc│÷¼F╣╩šŽĪŻę╗Ą®│÷¼F╣╩šŽŻ¼ŽĄĮy▒žĒÜū÷╣╩šŽ╠Ä└ĒŻ¼┤╦Ģr╚¶╣╩šŽ─▄ē“ūįąą┼┼│²Ż¼ät╗ųÅ═╝ė╣ż▀M│╠Ż¼Ę±ätÖC┤▓═ŻÖCĄ╚║“╚╦╣ż╠Ä└ĒĪŻę“┤╦Ż¼╣╩šŽÖz£y║═╠Ä└Ē╩Ū▒ŻūCöĄ┐žÖC┤▓░▓╚½▀\ąąĄ─ųžę¬╣”─▄─ŻēKĪŻį┌ū÷īŹļHæ¬ė├įOėŗĢrŻ¼┐╔═©▀^Ž┬┴ąÖCųŲ▀MąąŽĄĮy╣╩šŽÖz£y║═╠Ä└ĒŻ║
(1)ų„šŠį┌Įė╩š╦∙ėąÅ─šŠł¾╬─ĢrŻ¼×ķ├┐éĆÅ─šŠįOų├ę╗éĆ│¼ĢrėŗöĄŲ„Ż¼ėøõøÅ─šŠĄ─═©ą┼ĀŅørŻ¼╚ń╣¹é„▌ö│¼ĢrŻ¼ätį┌▓╗ė░Ēæų▄Ų┌ĢrķgĄ─Ū░╠ߎ┬Ż¼į┌ų▄Ų┌ķgŽČĢrķg┐žųŲųžé„Ż╗╚¶ųžé„╩¦öĪŻ¼ätīó╣╩šŽą┼Žó╝░Ģr╔Žł¾╔Ž╝ēöĄ┐žŽĄĮyĪŻ
(2)į┌Å─šŠł¾╬─ĀŅæBūųųąįOų├Õeš`╬╗Ż¼═©▀^╦³īóÅ─šŠÕeš`ą┼Žó╔Žł¾ų„šŠŻ¼╔Ž╝ēöĄ┐žŽĄĮyĖ∙ō■Õeš`┤a▀Mąą╣╩šŽ╠Ä└ĒĪŻ’
(3)į┌Å─šŠł¾╬─Ą─ĀŅæBūųųąįOų├Ę▒├”╬╗Ż¼═©▀^╦³īóÅ─šŠĘ▒├”Ż»┐šķeĄ─ĀŅæB╔Žł¾Įoų„šŠŻ¼╔Ž╝ēöĄ┐žŽĄĮyĖ∙ō■┤╦ą┼Žó┼ąöÓ╩ŪʱĘ┼┬²╣Ø┼┬ęį▒Ń┼cÅ─šŠ═¼▓ĮĪŻ
(4)ī”Įė╩šĄ─öĄō■Ż¼į┌ęį╠½ŠW▒Š╔Ē▀MąąčŁŁh╚▀ėÓÖz▓ķ(Cyclic Redundancy CheckŻ¼CRC)ąŻ“ץ─╗∙ĄA╔ŽŻ¼ŽĄĮy▀Ć▀MąąöĄō■Ą─ėąą¦ąįÖz“ׯ╗ī”ė┌ĘŪėąą¦Ą─öĄō■Ż¼╔Žł¾╔Ž╝ēöĄ┐žŽĄĮyŻ¼▓ó═©▀^įOų├ł¾╬─ųąĄ─Õeš`╬╗║═Õeš`┤a═©ų¬░l╦═ĘĮ▀Mąąųžé„╗“Ųõ╦¹╣╩šŽ╠Ä└ĒĪŻ
5 ĮY╩°šZ
▒Š╬─Ą─蹊┐╗∙ė┌ęį╠½ŠWĄ─īŹĢr═©ą┼š{Č╚║═Š½┤_ĢrķgĄ─═¼▓ĮŻ¼Įo│÷┴╦ę╗ĘNā×╗»╦ŃĘ©Ż¼ęįØMūŃöĄ┐žŽĄĮy▀\äė┐žųŲīė═©ą┼Ą─īŹĢr║═Ģrķg═¼▓Įę¬Ū¾ĪŻ╗∙ė┌įō╦ŃĘ©Ż¼╠ß│÷┴╦▒ŻūCŽĄĮyĘĆČ©┐╔┐┐▀\ąąĄ─ĢrķgŲ¼┼õų├▓▀┬įŻ¼įOėŗ┴╦öĄ┐žŽĄĮy▀\äė┐žųŲīė═©ą┼ģfūhĪŻūŅ║¾Ż¼═©▀^īŹ“ׯ¼Ęų╬÷║═“×ūC┴╦ŽĄĮyĄ─ąį─▄Ż¼×ķą┬ę╗┤·ŠWĮjöĄ┐žŽĄĮyĄ─čąųŲ╠ß╣®┴╦ģó┐╝ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌ęį╠½ŠWĄ─öĄ┐žŽĄĮyīŹĢr═©ą┼║═Ģrå¢═¼▓Į
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/support/1112157250.html






















